иҷҪ然д»ҺI2Cзү№жҖ§дёҠзҹҘжҷ“е…·жңүдёҚеҗҢI2Cең°еқҖзҡ„еҷЁд»¶жҳҜеҸҜд»ҘжҢӮиҪҪеңЁеҗҢдёҖдёӘI2CжҖ»зәҝдёҠиҝӣиЎҢйҖҡи®Ҝзҡ„пјҢдҪҶжҳҜпјҢеҰӮжһңйңҖиҰҒж“ҚдҪңзҡ„I2CеҷЁд»¶ең°еқҖеҶІзӘҒе‘ўпјҹMCUзҡ„硬件I2CжҺҘеҸЈж•°йҮҸдёҚеӨҹе‘ўпјҹжҲ–иҖ…иҜҙMCUзҡ„I2CдёҚж”ҜжҢҒд»ҺжңәеӨҡең°еқҖйҖҡи®ҜеҠҹиғҪе‘ўпјҹиҝҷж—¶еҖҷпјҢжҲ‘们иҝҳжҳҜйңҖиҰҒйҖҡиҝҮGPIOеҸЈжқҘжЁЎжӢҹI2Cж—¶еәҸе®ҢжҲҗI2Cдё»жңә/д»Һжңәзҡ„еҠҹиғҪгҖӮжүҖд»ҘпјҢ并дёҚжҳҜжңүдәҶ硬件I2CпјҢиҪҜ件I2Cе°ұжІЎжңүеҸ‘жҢҘзҡ„з©әй—ҙдәҶпјҢжҒ°жҒ°жҳҜиҪҜ件е’Ң硬件иҝҷдёӨз§Қе®һзҺ°ж–№ејҸе…ұеӯҳдә’зӣёиЎҘе……гҖӮ
дёҖгҖҒ硬件I2Cдё»жңәйҖҡи®Ҝ
MM32зҡ„硬件I2CжҳҜжҲ‘дҪҝз”ЁеҲ°зҺ°еңЁпјҢеңЁд»Јз ҒзЁӢеәҸж®өж“ҚдҪңжңҖдёәз®ҖжҙҒзҡ„дәҶпјӣдёҚйңҖиҰҒеҶҚеҺ»иҖғиҷ‘STARTдҝЎеҸ·гҖҒACKдҝЎеҸ·пјҢд»ҘеҸҠеҗ„з§ҚEVENTдәӢ件зӯүвҖҰвҖҰиҝҷдәӣеӨҚжқӮзҡ„ж“ҚдҪңгҖҒжҲ–иҖ…жҳҜеҸҜд»ҘзңҒз•Ҙзҡ„ж“ҚдҪңйғҪз”ұе®ҳж–№зҡ„еә•еұӮеә“зЁӢеәҸе’ҢиҠҜзүҮIPеҺ»е®һзҺ°дәҶпјҢи®©жҲ‘们еңЁи®ҫи®Ўй©ұеҠЁзЁӢеәҸж—¶еҸҳйҮҸз®ҖеҚ•дәҶгҖӮеҜ№дәҺ硬件I2Cдё»жңәзҡ„й…ҚзҪ®пјҢжҲ‘们еҸӘйңҖиҰҒеӨҚз”Ёзҡ„GPIOз«ҜеҸЈеј•и„ҡгҖҒI2CйҖҡи®ҜеҸӮж•°пјҢд»ҘеҸҠд»Һжңәең°еқҖеҚіеҸҜпјӣ然еҗҺе°ұеҸҜд»Ҙзј–зЁӢеҺ»иҜ»еҶҷI2Cд»Һжңәи®ҫеӨҮдәҶпјҢеҲқе§ӢеҢ–й…ҚзҪ®еҸҠеҜ№I2Cд»Һжңәи®ҫеӨҮзҡ„иҜ»еҶҷж“ҚдҪңзҡ„е®һзҺ°д»Јз ҒеҰӮдёӢпјҡvoid hI2C_MASTER_Init(uint8_t SlaveAddress){ GPIO_InitTypeDef GPIO_InitStructure; I2C_InitTypeDef I2C_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE);
I2C_StructInit(&I2C_InitStructure); I2C_InitStructure.I2C_Mode = I2C_Mode_MASTER; I2C_InitStructure.I2C_OwnAddress = 0; I2C_InitStructure.I2C_Speed = I2C_Speed_STANDARD; I2C_InitStructure.I2C_ClockSpeed = 100000; I2C_Init(I2C1, &I2C_InitStructure);
I2C_Send7bitAddress(I2C1, SlaveAddress, I2C_Direction_Transmitter); I2C_Cmd(I2C1, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB, &GPIO_InitStructure);}
void hI2C_MASTER_Read(uint8_t Address, uint8_t *Buffer, uint8_t Length){ uint8_t flag = 0, count = 0;
I2C_SendData(I2C1, Address); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE));
for(uint8_t i = 0; i < Length; i++) { while(1) { if((I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFNF)) && (flag == 0)) { I2C_ReadCmd(I2C1); count++; if(count == Length) flag = 1; }
if(I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_RFNE)) { Buffer[i] = I2C_ReceiveData(I2C1); break; } } }
I2C_GenerateSTOP(I2C1, ENABLE); while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));}
void hI2C_MASTER_Write(uint8_t Address, uint8_t *Buffer, uint8_t Length){ I2C_SendData(I2C1, Address); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE));
for(uint8_t i = 0; i < Length; i++) { I2C_SendData(I2C1, *Buffer++); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE)); }
I2C_GenerateSTOP(I2C1, ENABLE); while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));}
void hI2C_MASTER_SHELL_Handler(uint8_t Mode){ uint8_t Buffer[10] = {0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78, 0x89, 0x90, 0xAA};
if(Mode == 1) { hI2C_MASTER_Write(0x00, Buffer, sizeof(Buffer)); } else { hI2C_MASTER_Read(0x00, Buffer, sizeof(Buffer));
printf("\r\nhI2C Master Read : \r\n");
for(uint8_t i = 0; i < sizeof(Buffer); i++) { printf("0x%02x ", Buffer[i]); }
printf("\r\n"); }}SHELL_EXPORT_CMD(HI2C_MASTER, hI2C_MASTER_SHELL_Handler, Hardware I2C Master Read And Write);е®һжөӢз»“жһңеҰӮдёӢжүҖзӨәпјҡ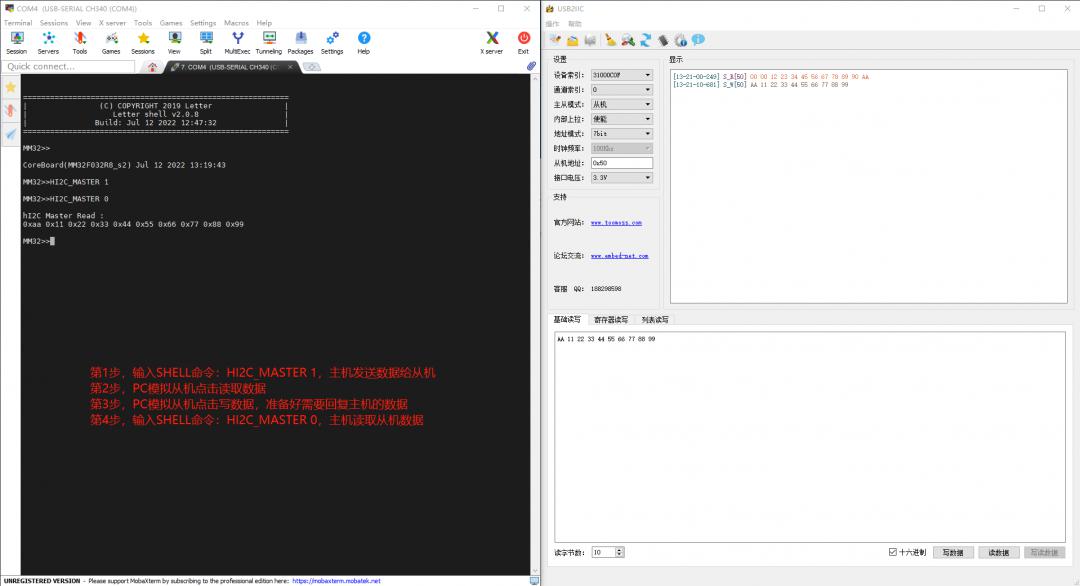
дәҢгҖҒиҪҜ件模жӢҹI2Cдё»жңәйҖҡи®Ҝ
еҜ№дәҺиҪҜ件模жӢҹI2Cдё»жңәйҖҡи®Ҝзҡ„е®һзҺ°ж–№ејҸпјҢдё»иҰҒжҳҜйҖҡиҝҮж“ҚдҪңGPIOз«ҜеҸЈеј•и„ҡзҡ„й«ҳдҪҺз”өе№іпјҢеңЁж»Ўи¶іI2CйҖҡи®Ҝж—¶еәҸзҡ„иҰҒжұӮдёҠе®ҢжҲҗеҜ№I2Cд»Һжңәи®ҫеӨҮзҡ„иҜ»еҶҷж“ҚдҪңпјӣеңЁе®һзҺ°иҪҜ件模жӢҹI2Cдё»жңәж—¶пјҢйңҖиҰҒжӯЈзЎ®зҡ„дә§з”ҹStartиө·е§ӢжқЎд»¶гҖҒStopеҒңжӯўжқЎд»¶пјҢд»ҘеҸҠRestartйҮҚеҗҜжқЎд»¶пјӣйңҖиҰҒеңЁйҖӮеҪ“зҡ„дҪҚзҪ®еҜ№GPIOз«ҜеҸЈеј•и„ҡзҡ„иҫ“е…Ҙиҫ“еҮәзҠ¶жҖҒиҝӣиЎҢй…ҚзҪ®пјҢд»ҘдҫҝиғҪеӨҹжӯЈзЎ®зҡ„еҲӨж–ӯеҮәACKе’ҢNACKзҡ„еә”зӯ”дҝЎеҸ·пјӣйңҖиҰҒжӯЈзЎ®ж“ҚдҪңеҸ‘йҖҒзҡ„еӯ—иҠӮж јејҸпјҢдҪҝең°еқҖеҶ…е®№гҖҒж•°жҚ®еҶ…е®№иғҪеӨҹиў«жӯЈзЎ®иҜҶеҲ«вҖҰвҖҰ
еҰӮдёӢзҡ„иҪҜ件模жӢҹI2Cдё»жңәзҡ„е®һзҺ°ж–№ејҸйҖҡиҝҮе®ҡд№үдәҶдёҖдёӘж“ҚдҪңз»“жһ„дҪ“пјҢйҖҡиҝҮдј йҖ’ж“ҚдҪңе®һдҫӢзҡ„ж–№ејҸпјҢи®©иҪҜ件模жӢҹI2Cдё»жңәзҡ„зЁӢеәҸе®һзҺ°дәҶйқўеҗ‘еҜ№иұЎзҡ„зј–зЁӢпјҢеҖҹдҪҸеҗҢдёҖж®өе®һзҺ°д»Јз ҒпјҢеҸҜд»ҘеҗҢж—¶е®һзҺ°еӨҡдёӘиҪҜ件模жӢҹI2Cдё»жңәйҖҡи®ҜжҺҘеҸЈпјҢеңЁд»Јз Ғе®һзҺ°дёҠеӨ§еӨ§зҡ„иҠӮзңҒдәҶз©әй—ҙпјҢеҗҢж—¶д№ҹи®©д»Јз Ғзҡ„еҸҜ移жӨҚжҖ§еҸҳеҫ—жӣҙеҠ йҖҡз”ЁпјҢе…·дҪ“зҡ„д»Јз Ғе®һзҺ°еҰӮдёӢжүҖзӨәпјҡ
typedef struct{ uint32_t SCL_RCC; GPIO_TypeDef *SCL_GPIO; uint16_t SCL_PIN;
uint32_t SDA_RCC; GPIO_TypeDef *SDA_GPIO; uint16_t SDA_PIN;
uint32_t TIME; uint8_t SlaveAddress;} sI2C_MASTER_TypeDef;
sI2C_MASTER_TypeDef sI2C_MASTER = { RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6, RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7, 100, 0xA0};
#define sI2C_MASTER_SCL_H(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_SET)#define sI2C_MASTER_SCL_L(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_RESET)
#define sI2C_MASTER_SDA_H(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET)#define sI2C_MASTER_SDA_L(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET)
#define sI2C_MASTER_SCL_GET(sI2C) GPIO_ReadOutputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN)#define sI2C_MASTER_SDA_GET(sI2C) GPIO_ReadInputDataBit( sI2C->SDA_GPIO, sI2C->SDA_PIN)
void sI2C_MASTER_Delay(uint32_t Tick){ while(Tick--);}
void sI2C_MASTER_SDA_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
if(Direction) /* Input */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; } else /* Output */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; }
GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);}
void sI2C_MASTER_SCL_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
if(Direction) /* Input */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; } else /* Output */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; }
GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure);}
void sI2C_MASTER_GenerateStart(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}
void sI2C_MASTER_GenerateStop(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}
void sI2C_MASTER_PutACK(sI2C_MASTER_TypeDef *sI2C, uint8_t ack){ if(ack) sI2C_MASTER_SDA_H(sI2C); /* NACK */ else sI2C_MASTER_SDA_L(sI2C); /* ACK */
sI2C_MASTER_Delay(sI2C->TIME);
sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}
uint8_t sI2C_MASTER_GetACK(sI2C_MASTER_TypeDef *sI2C){ uint8_t ack = 0;
sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);
sI2C_MASTER_SDA_SetDirection(sI2C, 1);
sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);
ack = sI2C_MASTER_SDA_GET(sI2C);
sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);
sI2C_MASTER_SDA_SetDirection(sI2C, 0);
return ack;}
uint8_t sI2C_MASTER_ReadByte(sI2C_MASTER_TypeDef *sI2C){ uint8_t Data = 0;
sI2C_MASTER_SDA_H(sI2C); /* Must set SDA before read */
sI2C_MASTER_SDA_SetDirection(sI2C, 1);
for(uint8_t i = 0; i < 8; i++) { sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);
Data <<= 1;
if(sI2C_MASTER_SDA_GET(sI2C)) Data |= 0x01;
sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); }
sI2C_MASTER_SDA_SetDirection(sI2C, 0);
return Data;}
void sI2C_MASTER_WriteByte(sI2C_MASTER_TypeDef *sI2C, uint8_t Data){ for(uint8_t i = 0; i < 8; i++) { if(Data & 0x80) sI2C_MASTER_SDA_H(sI2C); else sI2C_MASTER_SDA_L(sI2C);
Data <<= 1;
sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); }}
void sI2C_MASTER_Init(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_SetDirection(sI2C, 0); sI2C_MASTER_SCL_SetDirection(sI2C, 0);
sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}
uint8_t sI2C_MASTER_Read(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){ if(Length == 0) return 0;
sI2C_MASTER_GenerateStart(sI2C);
sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress);
if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; }
sI2C_MASTER_WriteByte(sI2C, Address);
if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; }
sI2C_MASTER_GenerateStart(sI2C);
sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress + 1);
if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; }
while(1) { *Buffer++ = sI2C_MASTER_ReadByte(sI2C);
if(--Length == 0) { sI2C_MASTER_PutACK(sI2C, 1); break; }
sI2C_MASTER_PutACK(sI2C, 0); }
sI2C_MASTER_GenerateStop(sI2C);
return 0;}
uint8_t sI2C_MASTER_Write(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){ uint8_t i = 0;
if(Length == 0) return 0;
sI2C_MASTER_GenerateStart(sI2C);
sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress);
if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; }
sI2C_MASTER_WriteByte(sI2C, Address);
if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; }
for(i = 0; i < Length; i++) { sI2C_MASTER_WriteByte(sI2C, *Buffer++);
if(sI2C_MASTER_GetACK(sI2C)) break; }
sI2C_MASTER_GenerateStop(sI2C);
if(i == Length) return 0; else return 1;}
void sI2C_MASTER_SHELL_Handler(uint8_t Mode){ uint8_t Buffer[10] = {0x11, 0x22, 0x33, 0x44, 0x55, 0xAA, 0xBB, 0xCC, 0xDD, 0xEE};
if(Mode == 1) { sI2C_MASTER_Write(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer)); } else { sI2C_MASTER_Read(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer));
printf("\r\nsI2C Master Read : \r\n");
for(uint8_t i = 0; i < sizeof(Buffer); i++) { printf("0x%02x ", Buffer[i]); }
printf("\r\n"); }}SHELL_EXPORT_CMD(SI2C_MASTER, sI2C_MASTER_SHELL_Handler, Software I2C Master Read And Write);е®һжөӢз»“жһңеҰӮдёӢжүҖзӨәпјҡ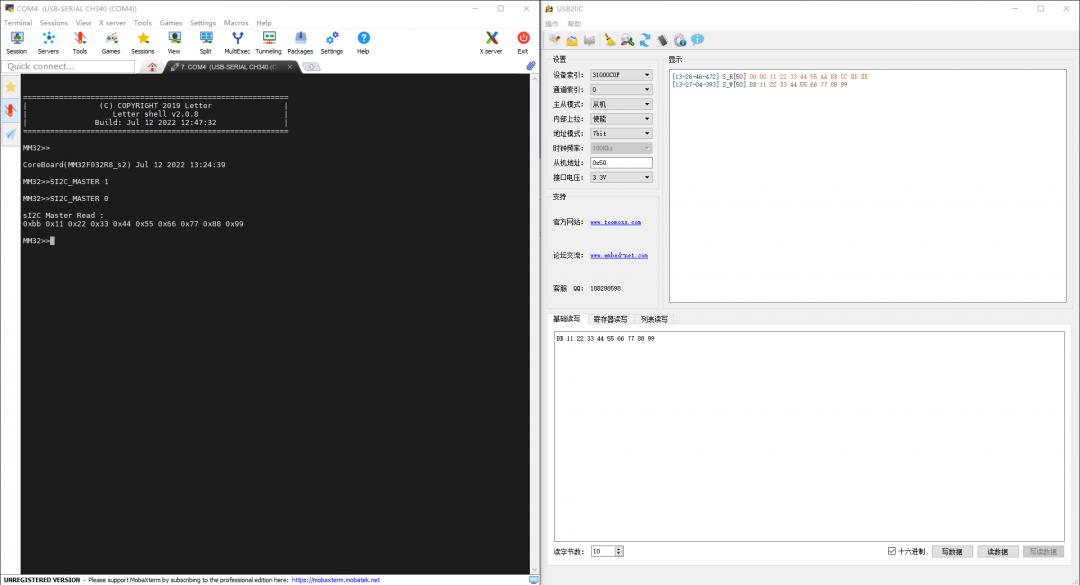
дёүгҖҒ硬件I2Cд»ҺжңәйҖҡи®Ҝ
еҜ№дәҺ硬件I2Cд»ҺжңәйҖҡи®ҜжқҘиҜҙпјҢжӣҙеӨҡзҡ„жҳҜйҮҮз”Ёдёӯж–ӯзҡ„е“Қеә”ж–№ејҸжқҘйҒҝе…ҚзЁӢеәҸеңЁжҹҗдёҖеӨ„дёҖзӣҙзӯүеҫ…I2Cдё»жңәзҡ„ж“ҚдҪңпјӣиҖҢиҪ®иҜўзҡ„ж–№ејҸеҫҲе®№жҳ“жҚ•жҚүдёҚеҲ°I2Cзҡ„иҜ·жұӮжҲ–иҖ…дәӢ件пјӣжүҖд»ҘеҰӮдёӢ硬件I2Cд»ҺжңәйҖҡи®Ҝзҡ„ж–№ејҸдҪҝз”Ёзҡ„е°ұжҳҜдёӯж–ӯеӨ„зҗҶж–№ејҸпјҢI2Cдё»жңәд»»дҪ•ж“ҚдҪңе’ҢиҜ·жұӮйғҪдјҡжҳ е°„жҲҗеҜ№еә”зҡ„дёӯж–ӯпјҢеҫ…д»ҺжңәжЈҖжөӢеҲ°дәҶд№ӢеҗҺпјҢиҝӣе…Ҙдёӯж–ӯиҝӣиЎҢзӣёеә”зҡ„еӨ„зҗҶпјҢеҗҢж—¶дёӯж–ӯзҡ„ж–№ејҸд№ҹдҝқиҜҒдәҶйҖҡи®Ҝзҡ„жӯЈеёёе’ҢзЁіе®ҡжҖ§гҖӮ
зҺ°еңЁеёӮйқўдёҠеҫҲеӨҡMCUзҡ„I2Cд»ҺжңәжЁЎејҸйғҪж”ҜжҢҒеӨҡең°еқҖжЁЎејҸпјҢдҪҶжҜҸ家зҡ„IPеҠҹиғҪи®ҫи®ЎйғҪдёҚдёҖж ·пјҡжңүдәӣжҳҜзӣҙжҺҘйҖҡиҝҮеҜ„еӯҳеҷЁи®ҫзҪ®д»Һжңәең°еқҖж–№ејҸпјҢиҝҷз§Қж–№ејҸйҷҗеҲ¶дәҶжүҖж”ҜжҢҒд»Һжңәең°еқҖзҡ„дёӘж•°пјӣжңүдәӣжҳҜйҖҡиҝҮең°еқҖжҺ©з Ғзҡ„ж–№ејҸпјҲзұ»дјјдәҺCANйҖҡи®Ҝзҡ„IDж»ӨжіўеҷЁпјүпјҢйҖҡиҝҮйҖҗдҪҚжҜ”иҫғзҡ„ж–№ејҸжқҘеҲӨеҲ«жүҖж”ҜжҢҒзҡ„I2Cд»Һжңәең°еқҖпјҢиҝҷз§Қж–№ејҸеҸҜд»Ҙж”ҜжҢҒеҫҲеӨҡдёӘд»Һжңәең°еқҖпјӣ第дәҢз§Қж–№ејҸзӣёжҜ”дәҺ第дёҖз§Қе®һзҺ°ж–№ејҸжӣҙзҒөжҙ»пјҢж”ҜжҢҒзҡ„д»Һжңәи®ҫеӨҮең°еқҖд№ҹжӣҙеӨҡпјҒ
MM32F032дёҚж”ҜжҢҒеӨҡең°еқҖд»ҺжңәеҠҹиғҪпјҢдҪҶMM32F0140ж”ҜжҢҒд»ҺжңәеӨҡең°еқҖйҖҡи®ҜпјҢеҸҜд»Ҙж №жҚ®е®һйҷ…йЎ№зӣ®йңҖжұӮйҖүжӢ©еҜ№еә”зҡ„иҠҜзүҮеһӢеҸ·пјӣд»ҺжңәеӨҡең°еқҖеҠҹиғҪйҮҮз”Ёзҡ„жҳҜең°еқҖжҺ©з Ғж–№ејҸжқҘиҝҮж»Өд»Һжңәең°еқҖзҡ„пјҢиҝҷж ·еҸҜд»Ҙж”ҜжҢҒжӣҙеӨҡзҡ„д»Һжңәи®ҫеӨҮең°еқҖпјӣйҖҡиҝҮи®ҫзҪ®д»Һжңәи®ҫеӨҮең°еқҖе’Ңд»Һжңәең°еқҖжҺ©з ҒжқҘе®һзҺ°д»ҺжңәеӨҡең°еқҖйҖҡи®ҜеҠҹиғҪпјӣ硬件I2Cд»ҺжңәйҖҡи®Ҝе…·дҪ“зҡ„д»Јз Ғе®һзҺ°еҰӮдёӢпјҡ
void hI2C_SLAVE_Init(uint8_t SlaveAddress){ I2C_InitTypeDef I2C_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure;
QUEUE_INIT(QUEUE_HI2C_SLAVE_IDX);
RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE);
I2C_StructInit(&I2C_InitStructure); I2C_InitStructure.Mode = I2C_Mode_SLAVE; I2C_InitStructure.OwnAddress = 0; I2C_InitStructure.Speed = I2C_Speed_FAST; I2C_InitStructure.ClockSpeed = 400000; I2C_Init(I2C1, &I2C_InitStructure);
I2C_ITConfig(I2C1, I2C_IT_RD_REQ, ENABLE); I2C_ITConfig(I2C1, I2C_IT_RX_FULL, ENABLE);
I2C_Cmd(I2C1, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_FLOATING; GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = I2C1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);
I2C_SendSlaveAddress(I2C1, SlaveAddress);}
void I2C1_IRQHandler(void){ static uint8_t Data = 0;
if(I2C_GetITStatus(I2C1, I2C_IT_RD_REQ) != RESET) { I2C_ClearITPendingBit(I2C1, I2C_IT_RD_REQ);
while(1) { I2C_SendData(I2C1, Data++); while(I2C_GetFlagStatus(I2C1, I2C_FLAG_TX_EMPTY) == RESET);
if((Data % 10) == 0) { I2C_GenerateSTOP(I2C1, ENABLE); break; } } }
if(I2C_GetITStatus(I2C1, I2C_IT_RX_FULL) != RESET) { QUEUE_WRITE(QUEUE_HI2C_SLAVE_IDX, I2C_ReceiveData(I2C1)); }}е®һжөӢз»“жһңеҰӮдёӢжүҖзӨәпјҡ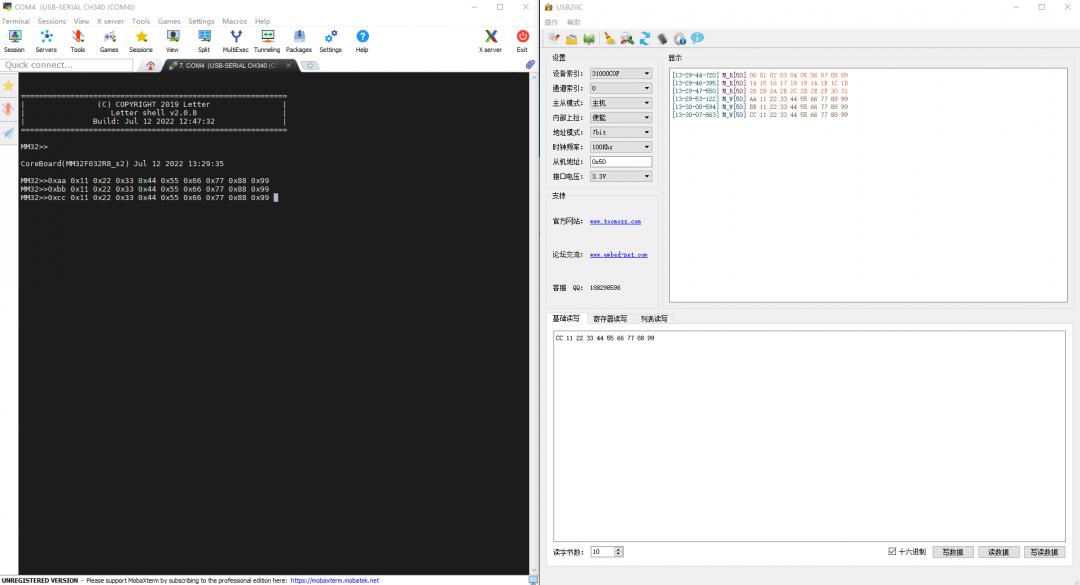
еӣӣгҖҒиҪҜ件模жӢҹI2Cд»ҺжңәйҖҡи®Ҝ
иҪҜ件模жӢҹI2Cд»ҺжңәйҖҡи®ҜжҳҜI2CйҖҡи®Ҝж—¶еәҸйҖҶеҗ‘зҡ„е®һзҺ°иҝҮзЁӢпјҢе®ғйңҖиҰҒйҖҡиҝҮжҚ•жҚүI2Cдё»жңәзҡ„дҝЎеҸ·ж—¶еәҸеҜ№дё»жңәзҡ„дәӢ件гҖҒиҜ·жұӮпјҢд»ҘеҸҠеҸ‘йҖҒиҝҮжқҘзҡ„ж•°жҚ®иҝӣиЎҢи§ЈжһҗпјҢеҸҲиҰҒжӯЈзЎ®зҡ„еӣһеӨҚI2Cдё»жңәпјҢжүҖд»Ҙе®ғзҡ„е®һзҺ°ж–№ејҸжҜ”I2CжЁЎжӢҹдё»жңәе®Ңе…ЁдёҚеҗҢгҖӮиҝҷйңҖиҰҒејҖеҸ‘иҖ…еҜ№I2Cж—¶еәҸеҚҒеҲҶзҶҹжӮүпјҢжүҖд»ҘеңЁз ”иҜ»дёӢйқўиҪҜ件模жӢҹI2Cд»ҺжңәйҖҡи®ҜзЁӢеәҸж—¶пјҢе»әи®®еҜ№з…§I2Cж—¶еәҸдёҖзӮ№зӮ№еҲҶжһҗпјҲжҸҗзӨәпјҡиҝҷйғЁеҲҶеҶ…е®№жңүзӮ№йҡҫеәҰпјүгҖӮ
еҜ№дәҺиҪҜ件模жӢҹI2Cд»ҺжңәйҖҡи®Ҝзҡ„е®һзҺ°жҳҜйҖҡиҝҮдёӨдёӘGPIOз«ҜеҸЈеј•и„ҡеҲҶеҲ«дёҺI2Cдё»жңәзҡ„SCLе’ҢSDAиҝӣиЎҢиҝһжҺҘпјҢзЁӢеәҸдёӯе°ҶиҝҷдёӨдёӘGPIOз«ҜеҸЈеј•и„ҡй…ҚзҪ®жҲҗеӨ–йғЁдёӯж–ӯEXTIе·ҘдҪңжЁЎејҸпјҢйҖҡиҝҮжҚ•иҺ·GPIOз«ҜеҸЈеј•и„ҡзҡ„дёҠеҚҮжІҝгҖҒдёӢйҷҚжІҝпјҢд»ҘеҸҠй«ҳдҪҺз”өе№ізҠ¶жҖҒпјҢй…ҚеҗҲиҪҜ件模жӢҹI2Cд»Һжңәзҡ„зҠ¶жҖҒз®ЎзҗҶпјҢе®һзҺ°дёҺI2Cдё»жңәд№Ӣй—ҙзҡ„йҖҡи®ҜеҠҹиғҪпјҢеңЁеҰӮдёӢзҡ„зЁӢеәҸдёӯж·»еҠ дәҶиҜҰз»Ҷзҡ„жіЁйҮҠе’ҢиҜҙжҳҺпјҢж–№дҫҝеӨ§е®¶йҳ…иҜ»е’ҢзҗҶи§ЈпјҢе…·дҪ“зҡ„д»Јз Ғе®һзҺ°еҰӮдёӢпјҡ
typedef struct{ uint32_t SCL_RCC; GPIO_TypeDef *SCL_GPIO; uint16_t SCL_PIN;
uint8_t SCL_EXTI_PortSource; uint8_t SCL_EXTI_PinSource; uint32_t SCL_EXTI_Line;
uint32_t SDA_RCC; GPIO_TypeDef *SDA_GPIO; uint16_t SDA_PIN;
uint8_t SDA_EXTI_PortSource; uint8_t SDA_EXTI_PinSource; uint32_t SDA_EXTI_Line;
uint8_t SlaveAddress;} sI2C_SLAVE_TypeDef;
sI2C_SLAVE_TypeDef sI2C_SLAVE = { RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6, EXTI_PortSourceGPIOB, EXTI_PinSource6, EXTI_Line6, RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7, EXTI_PortSourceGPIOB, EXTI_PinSource7, EXTI_Line7, 0xA0,};
#define sI2C_SLAVE_STATE_NA 0#define sI2C_SLAVE_STATE_STA 1#define sI2C_SLAVE_STATE_ADD 2#define sI2C_SLAVE_STATE_ADD_ACK 3#define sI2C_SLAVE_STATE_DAT 4#define sI2C_SLAVE_STATE_DAT_ACK 5#define sI2C_SLAVE_STATE_STO 6
uint8_t sI2C_SLAVE_State = sI2C_SLAVE_STATE_NA;
uint8_t sI2C_SLAVE_ShiftCounter = 0;uint8_t sI2C_SLAVE_SlaveAddress = 0;uint8_t sI2C_SLAVE_ReceivedData = 0;uint8_t sI2C_SLAVE_TransmitData = 0x50;
uint8_t sI2C_SLAVE_TransmitBuffer[16] = { 0x01, 0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78, 0x89, 0x9A, 0xAB, 0xBC, 0xCD, 0xDE, 0xEF, 0xF0,};uint8_t sI2C_SLAVE_TransmitIndex = 0;
bool sI2C_SLAVE_READ_SCL(sI2C_SLAVE_TypeDef *sI2C){ return GPIO_ReadInputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN);}
bool sI2C_SLAVE_READ_SDA(sI2C_SLAVE_TypeDef *sI2C){ return GPIO_ReadInputDataBit(sI2C->SDA_GPIO, sI2C->SDA_PIN);}
/******************************************************************************* * [url=home.php?mod=space&uid=247401]@brief[/url] й…ҚзҪ®жЁЎжӢҹI2Cзҡ„GPIOз«ҜеҸЈ, й»ҳи®Өи®ҫзҪ®жҲҗиҫ“е…ҘжЁЎејҸ, 并дҪҝиғҪзӣёеә”зҡ„еӨ–йғЁи§ҰеҸ‘ * дёӯж–ӯеҠҹиғҪ(дёҠеҚҮжІҝе’ҢдёӢйҷҚжІҝ) * @param * @retval * [url=home.php?mod=space&uid=93590]@Attention[/url] *******************************************************************************/void sI2C_SLAVE_Init(sI2C_SLAVE_TypeDef *sI2C){ GPIO_InitTypeDef GPIO_InitStructure; EXTI_InitTypeDef EXTI_InitStructure; NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE); RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure);
GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);
SYSCFG_EXTILineConfig(sI2C->SCL_EXTI_PortSource, sI2C->SCL_EXTI_PinSource);
EXTI_StructInit(&EXTI_InitStructure); EXTI_InitStructure.EXTI_Line = sI2C->SCL_EXTI_Line; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure);
SYSCFG_EXTILineConfig(sI2C->SDA_EXTI_PortSource, sI2C->SDA_EXTI_PinSource);
EXTI_StructInit(&EXTI_InitStructure); EXTI_InitStructure.EXTI_Line = sI2C->SDA_EXTI_Line; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_15_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 0x00; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);}
/******************************************************************************* * [url=home.php?mod=space&uid=247401]@brief[/url] и®ҫзҪ®SDAдҝЎеҸ·зәҝзҡ„иҫ“е…Ҙиҫ“еҮәж–№дҫҝ, 0д»ЈиЎЁOutputиҫ“еҮә, 1д»ЈиЎЁInputиҫ“е…Ҙ * @param * @retval * [url=home.php?mod=space&uid=93590]@Attention[/url] *******************************************************************************/void sI2C_SLAVE_SDA_SetDirection(sI2C_SLAVE_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure;
if(Direction) /* Input */ { GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure); } else /* Output */ { GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure); }}
/****************************************************************************** * @brief и®ҫзҪ®SDAдҝЎеҸ·зәҝзҡ„иҫ“еҮәз”өе№і(й«ҳз”өе№і / дҪҺз”өе№і) * @param * @retval * @attention ******************************************************************************/void sI2C_SLAVE_SDA_SetLevel(sI2C_SLAVE_TypeDef *sI2C, uint8_t Level){ sI2C_SLAVE_SDA_SetDirection(sI2C, 0);
if(Level) { GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET); } else { GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET); }}
/****************************************************************************** * @brief еҪ“SCLи§ҰеҸ‘дёҠеҚҮжІҝеӨ–йғЁдёӯж–ӯж—¶зҡ„еӨ„зҗҶ * @param * @retval * @attention ******************************************************************************/void sI2C_SLAVE_SCL_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){ /* SCLдёәдёҠеҚҮжІҝ, ж•°жҚ®й”Ғе®ҡ, дё»д»Һжңәд»ҺSDAжҖ»зәҝдёҠиҺ·еҸ–ж•°жҚ®дҪҚ */ switch(sI2C_SLAVE_State) { case sI2C_SLAVE_STATE_ADD:
/* I2CеҸ‘йҖҒйҒөд№үMSB, е…ҲеҸ‘йҖҒй«ҳдҪҚ, еҶҚеҸ‘йҖҒдҪҺдҪҚ, жүҖд»ҘеңЁжҺҘ收зҡ„ж—¶еҖҷ, ж•°жҚ®иҝӣиЎҢе·Ұ移 */
sI2C_SLAVE_SlaveAddress <<= 1; sI2C_SLAVE_ShiftCounter += 1;
if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET) { sI2C_SLAVE_SlaveAddress |= 0x01; }
/* еҪ“жҺҘ收еҲ°8дҪҚең°еқҖдҪҚеҗҺ, д»ҺжңәйңҖиҰҒеңЁз¬¬9дёӘж—¶й’ҹз»ҷеҮәACKеә”зӯ”, зӯүеҫ…SCLдёӢйҷҚжІҝзҡ„ж—¶еҖҷз»ҷеҮәACKдҝЎеҸ· */ if(sI2C_SLAVE_ShiftCounter == 8) { sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD_ACK; } break;
case sI2C_SLAVE_STATE_ADD_ACK: /* д»Һжңәең°еқҖзҡ„ACKеӣһеӨҚеҗҺ, еҲҮжҚўеҲ°ж”¶еҸ‘ж•°жҚ®зҠ¶жҖҒ */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT;
sI2C_SLAVE_ShiftCounter = 0; /* ж•°жҚ®з§»дҪҚи®Ўж•°еҷЁжё…йӣ¶ */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVEзҡ„жҺҘ收数жҚ®жё…йӣ¶ */ break;
case sI2C_SLAVE_STATE_DAT: if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* дё»жңәеҶҷж“ҚдҪңпјҡжӯӨж—¶д»Һжңәеә”иҜҘиҺ·еҸ–дё»жңәеҸ‘йҖҒзҡ„SDAдҝЎеҸ·зәҝз”өе№ізҠ¶жҖҒ, иҝӣиЎҢдҪҚеӯҳеӮЁ */ sI2C_SLAVE_ReceivedData <<= 1; sI2C_SLAVE_ShiftCounter += 1;
if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET) { sI2C_SLAVE_ReceivedData |= 0x01; }
/* еҪ“收еҲ°дёҖдёӘе®Ңж•ҙзҡ„8дҪҚж•°жҚ®ж—¶, е°Ҷ收еҲ°зҡ„ж•°жҚ®еӯҳж”ҫеҲ°I2CжҺҘ收ж¶ҲжҒҜйҳҹеҲ—дёӯ, зҠ¶жҖҒиҪ¬жҚўеҲ°з»ҷдё»жңәеҸ‘йҖҒACKеә”зӯ” */ if(sI2C_SLAVE_ShiftCounter == 8) { QUEUE_WRITE(QUEUE_SI2C_SLAVE_IDX, sI2C_SLAVE_ReceivedData);
sI2C_SLAVE_ShiftCounter = 0; /* ж•°жҚ®з§»дҪҚи®Ўж•°еҷЁжё…йӣ¶ */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVEзҡ„жҺҘ收数жҚ®жё…йӣ¶ */
sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK; } } else { /* дё»жңәиҜ»ж“ҚдҪңпјҡеңЁSCLдёҠеҚҮжІҝзҡ„ж—¶еҖҷ, дё»жңәиҺ·еҸ–еҪ“еүҚSDAзҡ„зҠ¶жҖҒдҪҚ, еҰӮжһңеҲ°дәҶ第8дёӘж•°дҪҚзҡ„дёҠеҚҮжІҝ, * йӮЈжҺҘдёӢжқҘе°ұжҳҜдё»жңәеӣһеӨҚд»Һжңәзҡ„еә”зӯ”жҲ–йқһеә”зӯ”дҝЎеҸ·дәҶ, жүҖд»Ҙе°ҶзҠ¶жҖҒеҲҮжҚўеҲ°зӯүеҫ…ACKзҡ„зҠ¶жҖҒ, еҗҢж—¶еҮҶеӨҮдёӢдёҖдёӘйңҖиҰҒеҸ‘йҖҒзҡ„ж•°жҚ® */ if(sI2C_SLAVE_ShiftCounter == 8) { sI2C_SLAVE_ShiftCounter = 0; /* sI2C_SLAVEзҡ„жҺҘ收数жҚ®жё…йӣ¶ */ sI2C_SLAVE_TransmitData = sI2C_SLAVE_TransmitBuffer[sI2C_SLAVE_TransmitIndex++];
sI2C_SLAVE_TransmitIndex %= 16;
sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK; } } break;
case sI2C_SLAVE_STATE_DAT_ACK: if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* дё»жңәеҶҷж“ҚдҪңпјҡд»ҺжңәеҸ‘йҖҒACK, зӯүеҫ…дё»жңәиҜ»еҸ–д»ҺжңәеҸ‘йҖҒзҡ„ACKдҝЎеҸ· */
sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* зҠ¶жҖҒеҲҮжҚўеҲ°ж•°жҚ®жҺҘ收зҠ¶жҖҒ */ } else { /* дё»жңәиҜ»ж“ҚдҪңпјҡдё»жңәеҸ‘йҖҒACK, д»ҺжңәеҸҜд»ҘиҜ»еҸ–дё»жңәеҸ‘йҖҒзҡ„ACKдҝЎеҸ· */
uint8_t ack = sI2C_SLAVE_READ_SDA(sI2C);
if(ack == Bit_RESET) { sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* жҺҘ收еҲ° ACK, 继з»ӯеҸ‘йҖҒж•°жҚ® */ } else { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO; /* жҺҘ收еҲ°NACK, еҒңжӯўеҸ‘йҖҒж•°жҚ® */ } } break;
default: break; }}
/****************************************************************************** * @brief еҪ“SCLи§ҰеҸ‘дёӢйҷҚжІҝеӨ–йғЁдёӯж–ӯж—¶зҡ„еӨ„зҗҶ * @param * @retval * @attention ******************************************************************************/void sI2C_SLAVE_SCL_FallHandler(sI2C_SLAVE_TypeDef *sI2C){ /* SCLдёәдёӢйҷҚжІҝ, ж•°жҚ®еҸҜеҸҳ */ switch(sI2C_SLAVE_State) { case sI2C_SLAVE_STATE_STA: /* * жЈҖжөӢеҲ°STARTдҝЎеҸ·еҗҺ, SCL第дёҖдёӘдёӢйҷҚжІҝиЎЁзӨәејҖе§Ӣдј иҫ“Slave Address, * ж №жҚ®ж•°жҚ®жңүж•ҲжҖ§зҡ„规еҲҷ, ең°еқҖзҡ„第дёҖдҪҚйңҖиҰҒзӯүеҲ°SCLеҸҳдёәй«ҳз”өе№іж—¶жүҚеҸҜд»ҘиҜ»еҸ– * еҲҮжҚўеҲ°иҺ·еҸ–Slave Addressзҡ„зҠ¶жҖҒ, зӯүеҫ…SCLзҡ„дёҠеҚҮжІҝи§ҰеҸ‘ */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD;
sI2C_SLAVE_ShiftCounter = 0; /* ж•°жҚ®з§»дҪҚи®Ўж•°еҷЁжё…йӣ¶ */ sI2C_SLAVE_SlaveAddress = 0; /* sI2C_SLAVEзҡ„д»Һжңәең°еқҖжё…йӣ¶ */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVEзҡ„жҺҘ收数жҚ®жё…йӣ¶ */ break;
case sI2C_SLAVE_STATE_ADD: /* * еңЁдё»жңәеҸ‘йҖҒSlave Addressзҡ„ж—¶еҖҷ, д»ҺжңәеҸӘжҳҜиҜ»еҸ–SDAзҠ¶жҖҒ, иҝӣиЎҢең°еқҖи§Јжһҗ, жүҖд»Ҙиҝҷиҫ№жІЎжңүеӨ„зҗҶ */ break;
case sI2C_SLAVE_STATE_ADD_ACK:
/* SCLдҪҺз”өе№ізҡ„ж—¶еҖҷ, з»ҷI2CжҖ»зәҝеҸ‘йҖҒең°еқҖзҡ„еә”зӯ”дҝЎеҸ·, зҠ¶жҖҒдёҚеҸ‘з”ҹж”№еҸҳ, зӯүеҫ…дёӢдёҖдёӘдёҠеҚҮжІҝе°ҶACKеҸ‘йҖҒеҮәеҺ» */
sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* е°ҶSDAдҝЎеҸ·жӢүдҪҺ, еҗ‘дё»жңәеҸ‘йҖҒACKдҝЎеҸ· */ break;
case sI2C_SLAVE_STATE_DAT:
/* еңЁSCLж—¶й’ҹдҝЎеҸ·зҡ„дёӢйҷҚжІҝ, SDAдҝЎеҸ·зәҝеӨ„зҗҶеҸҜеҸҳзҡ„зҠ¶жҖҒ */
if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* дё»жңәеҶҷж“ҚдҪңпјҡе°ҶSDAдҝЎеҸ·зәҝи®ҫзҪ®жҲҗиҺ·еҸ–зҠ¶жҖҒ, зӯүеҫ…дёӢдёҖдёӘSCLдёҠеҚҮжІҝж—¶иҺ·еҸ–ж•°жҚ®дҪҚ */ sI2C_SLAVE_SDA_SetDirection(sI2C, 1); } else { /* дё»жңәиҜ»ж“ҚдҪңпјҡж №жҚ®еҸ‘йҖҒзҡ„ж•°жҚ®дҪҚи®ҫзҪ®SDAдҝЎеҸ·зәҝзҡ„иҫ“еҮәз”өе№і, зӯүеҫ…дёӢдёҖдёӘSCLдёҠеҚҮжІҝж—¶еҸ‘йҖҒж•°жҚ®дҪҚ */ if(sI2C_SLAVE_TransmitData & 0x80) { sI2C_SLAVE_SDA_SetLevel(sI2C, 1); } else { sI2C_SLAVE_SDA_SetLevel(sI2C, 0); }
sI2C_SLAVE_TransmitData <<= 1; sI2C_SLAVE_ShiftCounter += 1; } break;
case sI2C_SLAVE_STATE_DAT_ACK:
/* еңЁз¬¬8дёӘSCLж—¶й’ҹдҝЎеҸ·дёӢйҷҚжІҝзҡ„еӨ„зҗҶ */
if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* дё»жңәеҶҷж“ҚдҪңпјҡд»ҺжңәеңЁжҺҘ收еҲ°ж•°жҚ®еҗҺ, йңҖиҰҒз»ҷдё»жңәдёҖдёӘACKеә”зӯ”дҝЎеҸ·, зҠ¶жҖҒдёҚеҸ‘з”ҹж”№еҸҳ, зӯүеҫ…дёӢдёҖдёӘдёҠеҚҮжІҝе°ҶACKеҸ‘йҖҒеҮәеҺ» */
sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* е°ҶSDAдҝЎеҸ·жӢүдҪҺ, еҗ‘дё»жңәеҸ‘йҖҒACKдҝЎеҸ· */ } else { /* дё»жңәиҜ»ж“ҚдҪңпјҡд»ҺжңәйңҖиҰҒйҮҠж”ҫеҪ“еүҚзҡ„SDAдҝЎеҸ·зәҝ, д»Ҙдҫҝдё»жңәеҸ‘йҖҒACKжҲ–NACKз»ҷд»Һжңә, зҠ¶жҖҒдёҚеҸ‘з”ҹж”№еҸҳ, зӯүеҫ…дёӢдёҖдёӘдёҠеҚҮжІҝиҜ»еҸ–ACKдҝЎеҸ· */ sI2C_SLAVE_SDA_SetDirection(sI2C, 1); } break;
default: break; }}
/** * @brief еҪ“SDAи§ҰеҸ‘дёҠеҚҮжІҝеӨ–йғЁдёӯж–ӯж—¶зҡ„еӨ„зҗҶ * @param None * @retval None */void sI2C_SLAVE_SDA_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){ if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCLдёәй«ҳж—¶,SDAдёәдёҠеҚҮжІҝпјҡSTOP */ { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO; } else /* SCLдёәдҪҺж—¶,SDAдёәдёҠеҚҮжІҝпјҡж•°жҚ®зҡ„еҸҳеҢ– */ { }}
/** * @brief еҪ“SDAи§ҰеҸ‘дёӢйҷҚжІҝеӨ–йғЁдёӯж–ӯж—¶зҡ„еӨ„зҗҶ * @param None * @retval None */void sI2C_SLAVE_SDA_FallHandler(sI2C_SLAVE_TypeDef *sI2C){ if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCLдёәй«ҳж—¶,SDAдёәдёӢйҷҚжІҝпјҡSTART */ { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STA; } else /* SCLдёәдҪҺж—¶,SDAдёәдёӢйҷҚжІҝпјҡж•°жҚ®зҡ„еҸҳеҢ– */ { }}
/******************************************************************************* * @brief * @param * @retval * @attention *******************************************************************************/void EXTI4_15_IRQHandler(void){ /* I2C SCL */ if(EXTI_GetITStatus(sI2C_SLAVE.SCL_EXTI_Line) != RESET) { if(sI2C_SLAVE_READ_SCL(&sI2C_SLAVE) == Bit_SET) { sI2C_SLAVE_SCL_RiseHandler(&sI2C_SLAVE); } else { sI2C_SLAVE_SCL_FallHandler(&sI2C_SLAVE); }
EXTI_ClearITPendingBit(sI2C_SLAVE.SCL_EXTI_Line); }
/* I2C SDA */ if(EXTI_GetITStatus(sI2C_SLAVE.SDA_EXTI_Line) != RESET) { if(sI2C_SLAVE_READ_SDA(&sI2C_SLAVE) == Bit_SET) { sI2C_SLAVE_SDA_RiseHandler(&sI2C_SLAVE); } else { sI2C_SLAVE_SDA_FallHandler(&sI2C_SLAVE); }
EXTI_ClearITPendingBit(sI2C_SLAVE.SDA_EXTI_Line); }}е®һжөӢз»“жһңеҰӮдёӢжүҖзӨәпјҡ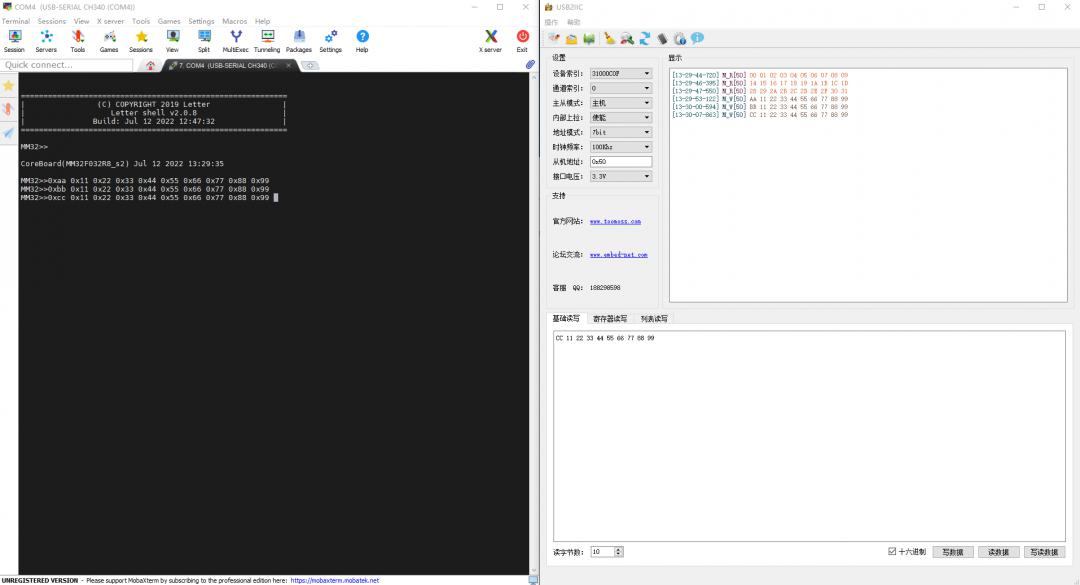
жҺЁиҚҗйҳ…иҜ»
 е…„ејҹ们пјҢиҜ·зӮ№иөһгҖҒеңЁзңӢгҖҒеҲҶдә«????еҘҪеҶ…е®№йңҖиҰҒжӮЁзҡ„ж”ҜжҢҒпјҒ
е…„ејҹ们пјҢиҜ·зӮ№иөһгҖҒеңЁзңӢгҖҒеҲҶдә«????еҘҪеҶ…е®№йңҖиҰҒжӮЁзҡ„ж”ҜжҢҒпјҒ