жң¬ж–ҮжҺҲжқғиҪ¬иҮӘпјҡ
дҪңиҖ…пјҡжқ°жқ°
д»Җд№ҲжҳҜдёҙз•Ңж®ө
д»Јз Ғзҡ„дёҙз•Ңж®өд№ҹз§°дёәдёҙз•ҢеҢәпјҢжҢҮеӨ„зҗҶж—¶дёҚеҸҜеҲҶеүІзҡ„д»Јз ҒеҢәеҹҹпјҢдёҖж—ҰиҝҷйғЁеҲҶд»Јз ҒејҖе§Ӣжү§иЎҢпјҢеҲҷдёҚе…Ғи®ёд»»дҪ•дёӯж–ӯжү“ж–ӯгҖӮдёәзЎ®дҝқдёҙз•Ңж®өд»Јз Ғзҡ„жү§иЎҢдёҚиў«дёӯж–ӯпјҢеңЁиҝӣе…Ҙдёҙз•Ңж®өд№ӢеүҚйЎ»е…ідёӯж–ӯпјҢиҖҢдёҙз•Ңж®өд»Јз Ғжү§иЎҢе®ҢжҜ•еҗҺпјҢиҰҒз«ӢеҚіжү“ејҖдёӯж–ӯгҖӮдёҙз•Ңж®өзҡ„дҪңз”Ё
е…¶е®һеңЁRTOSдёӯпјҢдҪҝз”ЁжңҖеӨҡзҡ„дёҙз•Ңж®өжҳҜOSжң¬иә«зҡ„и°ғз”ЁпјҢдҪҶжҳҜжҲ‘们用жҲ·д№ҹжҳҜйңҖиҰҒеҜ№дёҙз•Ңиө„жәҗиҝӣиЎҢдҝқжҠӨзҡ„пјҲдёҙз•Ңиө„жәҗжҳҜдёҖж¬Ўд»…е…Ғи®ёдёҖдёӘзәҝзЁӢдҪҝз”Ёзҡ„е…ұдә«иө„жәҗпјүпјҢзү№еҲ«жҳҜдёҖдәӣе…ЁеұҖеҸҳйҮҸпјҢеҪ“зәҝзЁӢжӯЈеңЁдҪҝз”Ёзҡ„ж—¶еҖҷдёҚеёҢжңӣжңүдәәжқҘжү“ж–ӯжҲ‘зҡ„ж“ҚдҪңпјҢе°ұиЎҢеҫҲеӨҡж—¶еҖҷжҲ‘们еҶҷд»Јз Ғж—¶пјҢйңҖиҰҒйӣҶдёӯзІҫеҠӣпјҢдёҚеёҢжңӣеҲ«дәәжү“ж–ӯжҲ‘们зҡ„жҖқи·ҜдёҖж ·гҖӮиҝҷж ·еӯҗдҪҝеҫ—зі»з»ҹзҡ„иҝҗиЎҢжӣҙеҠ зЁіе®ҡеҒҘеЈ®гҖӮд»Җд№Ҳж—¶еҖҷдјҡжү“ж–ӯд»Јз Ғзҡ„жү§иЎҢпјҹ
еҰӮдҪ•е…ій—ӯдёӯж–ӯпјҹ
е…¶е®һпјҢеңЁжҲ‘们常用зҡ„MCUдёӯпјҢдёҖиҲ¬дёәCortex-MеҶ…ж ёзҡ„пјҢMеҶ…ж ёжҳҜжңүдёҖдәӣжҢҮд»ӨиғҪеҝ«йҖҹе…ій—ӯдёӯж–ӯпјҢдёҖиө·жқҘзңӢзңӢCortex-MжқғеЁҒжҢҮеҚ—еҗ§пјҲд»ҘCortex-M3дёәдҫӢпјүгҖӮ
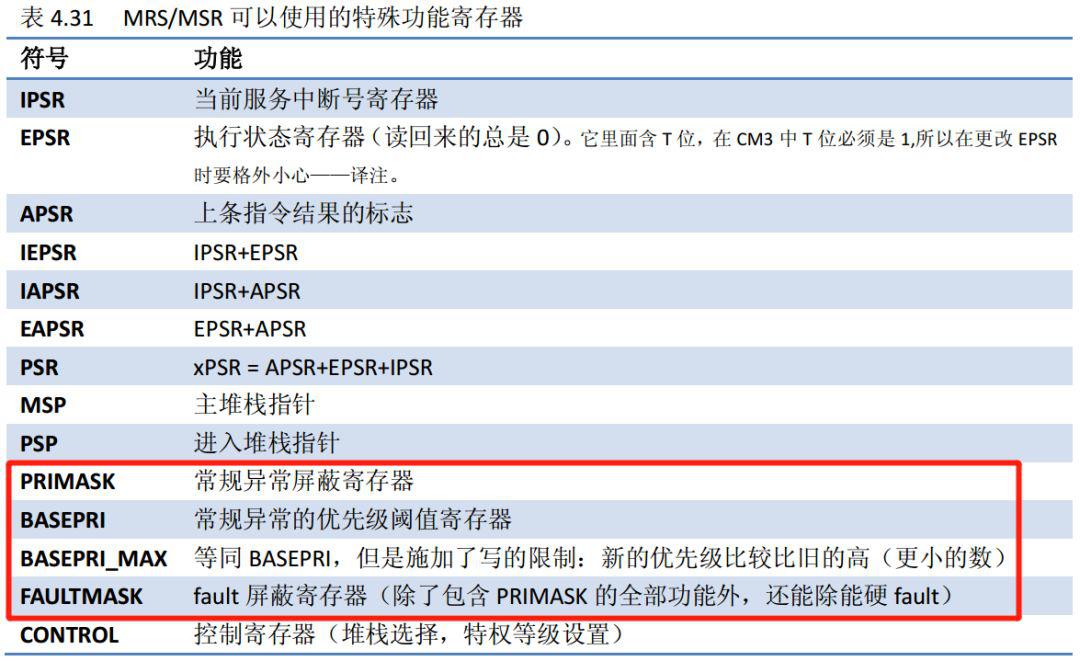
з®ҖеҚ•жқҘиҜҙпјҢеҝ«йҖҹеұҸи”Ҫдёӯж–ӯе°ұжҳҜеӨ„зҗҶиҝҷдәӣеҶ…ж ёеҜ„еӯҳеҷЁпјҢеңЁCortex-Mдёӯжңүзӣёеә”зҡ„ж“ҚдҪңжҢҮд»ӨпјҢдёҖиҲ¬жҲ‘д»¬ж— йңҖе…іжіЁпјҢеӣ дёәOSе·Із»Ҹз»ҷжҲ‘们еҶҷеҘҪдәҶиҝҷдәӣеә•еұӮзҡ„дёңиҘҝгҖӮдёҚиҝҮеҰӮжһңдҪ жҳҜжғіиҮӘе·ұеҶҷдёҖдёӘOSзҡ„иҜқпјҢеҸҜд»ҘдәҶи§ЈдёҖдёӢпјҢиҰҒи®ҝй—® PRIMASK, FAULTMASK д»ҘеҸҠ BASEPRIпјҢеҗҢж ·иҰҒдҪҝз”Ё MRS/MSR жҢҮд»Ө,еҰӮпјҡ
1MRS R0, BASEPRI ;иҜ»еҸ– BASEPRI еҲ° R0 дёӯ
2MRS R0, FAULTMASK ;дјјдёҠ
3MRS R0, PRIMASK ;дјјдёҠ
4MSR BASEPRI, R0 ;еҶҷе…Ҙ R0 еҲ° BASEPRI дёӯ
5MSR FAULTMASK, R0 ;дјјдёҠ
6MSR PRIMASK, R0 ;дјјдёҠеҸӘжңүеңЁзү№жқғзә§дёӢпјҢжүҚе…Ғи®ёи®ҝй—®иҝҷ 3 дёӘеҜ„еӯҳеҷЁгҖӮ
е…¶е®һпјҢдёәдәҶеҝ«йҖҹең°ејҖе…ідёӯж–ӯпјҢ CM3 иҝҳдё“й—Ёи®ҫзҪ®дәҶдёҖжқЎ CPS жҢҮд»ӨпјҢжңү 4 з§Қз”Ёжі•пјҡ

1CPSID I ;PRIMASK=1пјҢ ;е…ідёӯж–ӯ
2CPSIE I ;PRIMASK=0пјҢ ;ејҖдёӯж–ӯ
3CPSID F ;FAULTMASK=1, ;е…іејӮеёё
4CPSIE F ;FAULTMASK=0 ;ејҖејӮеёё
дёҠйқўзҡ„д»Јз Ғдёӯзҡ„PRIMASKе’Ң FAULTMAST жҳҜ Cortex-M еҶ…ж ё йҮҢйқўдёүдёӘдёӯж–ӯеұҸи”ҪеҜ„еӯҳеҷЁдёӯзҡ„дёӨдёӘпјҢиҝҳжңүдёҖдёӘжҳҜ BASEPRIпјҢиҝҷдәӣеҜ„еӯҳеҷЁйғҪз”ЁдәҺеұҸи”Ҫдёӯж–ӯгҖӮе…·дҪ“зҡ„дҪңз”Ёи§ҒиЎЁж јпјҲиЎЁж јеҮәиҮӘгҖҠгҖҗйҮҺзҒ«гҖ‘RT-Thread еҶ…ж ёе®һзҺ°дёҺеә”з”ЁејҖеҸ‘е®һжҲҳжҢҮеҚ—гҖӢпјү
| еҗҚеӯ— | еҠҹиғҪжҸҸиҝ° |
| PRIMASK | иҝҷжҳҜдёӘеҸӘжңүеҚ•дёҖжҜ”зү№зҡ„еҜ„еӯҳеҷЁгҖӮ еңЁе®ғиў«зҪ® 1 еҗҺпјҢе°ұе…іжҺүжүҖжңүеҸҜеұҸи”Ҫзҡ„ејӮеёёпјҢеҸӘеү©дёӢ NMI е’ҢзЎ¬ FAULT еҸҜд»Ҙе“Қеә”гҖӮе®ғзҡ„зјәзңҒеҖјжҳҜ 0пјҢиЎЁзӨәжІЎжңүе…ідёӯж–ӯгҖӮ |
| FAULTMASK | иҝҷжҳҜдёӘеҸӘжңү 1 дёӘдҪҚзҡ„еҜ„еӯҳеҷЁгҖӮеҪ“е®ғзҪ® 1 ж—¶пјҢеҸӘжңү NMI жүҚиғҪе“Қеә”пјҢжүҖжңүе…¶е®ғзҡ„ејӮеёёпјҢз”ҡиҮіжҳҜзЎ¬ FAULTпјҢд№ҹйҖҡйҖҡй—ӯеҳҙгҖӮе®ғзҡ„зјәзңҒеҖјд№ҹжҳҜ 0пјҢиЎЁзӨәжІЎжңүе…іејӮеёёгҖӮ |
| BASEPRI | иҝҷдёӘеҜ„еӯҳеҷЁжңҖеӨҡжңү 9 дҪҚпјҲз”ұиЎЁиҫҫдјҳе…Ҳзә§зҡ„дҪҚж•°еҶіе®ҡпјүгҖӮе®ғе®ҡд№үдәҶиў«еұҸи”Ҫдјҳе…Ҳзә§зҡ„йҳҲеҖјгҖӮеҪ“е®ғиў«и®ҫжҲҗжҹҗдёӘеҖјеҗҺпјҢжүҖжңүдјҳе…Ҳзә§еҸ·еӨ§дәҺзӯүдәҺжӯӨеҖјзҡ„дёӯж–ӯйғҪиў«е…іпјҲдјҳе…Ҳзә§еҸ·и¶ҠеӨ§пјҢдјҳе…Ҳзә§и¶ҠдҪҺпјүгҖӮдҪҶиӢҘиў«и®ҫжҲҗ 0пјҢеҲҷдёҚе…ій—ӯд»»дҪ•дёӯж–ӯпјҢ 0 д№ҹжҳҜзјәзңҒеҖјгҖӮ |
дёҚеҗҢOSзҡ„еӨ„зҗҶдёҙз•Ңж®өзҡ„еҢәеҲ«
FreeRTOSпјҡ
FreeRTOSеҜ№дёӯж–ӯзҡ„ејҖе’Ңе…іжҳҜйҖҡиҝҮж“ҚдҪң BASEPRI еҜ„еӯҳеҷЁжқҘе®һзҺ°зҡ„пјҢеҚіеӨ§дәҺзӯүдәҺ BASEPRI зҡ„еҖјзҡ„дёӯж–ӯдјҡиў«еұҸи”ҪпјҢе°ҸдәҺ BASEPRI зҡ„еҖјзҡ„дёӯж–ӯеҲҷдёҚдјҡиў«еұҸи”ҪгҖӮиҝҷж ·еӯҗзҡ„еҘҪеӨ„е°ұжҳҜз”ЁжҲ·еҸҜд»Ҙи®ҫзҪ® BASEPRI зҡ„еҖјжқҘйҖүжӢ©жҖ§зҡ„з»ҷдёҖдәӣйқһеёёзҙ§жҖҘзҡ„дёӯж–ӯз•ҷдёҖжқЎеҗҺи·ҜгҖӮжҜ”еҰӮйЈһжҺ§зҡ„йҳІж’һеӨ„зҗҶгҖӮд»Јз ҒеңЁportmacro.h дёӯе®һзҺ°пјҡ
еұҸи”Ҫдёӯж–ӯпјҡ
1static portFORCE_INLINE void vPortRaiseBASEPRI( void )
2{
3uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;
4
5 __asm
6 {
7 msr basepri, ulNewBASEPRI
8 dsb
9 isb
10 }
11}
жү“ејҖдёӯж–ӯпјҡ
1static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
2{
3 __asm
4 {
5 msr basepri, ulBASEPRI
6 }
7}
RT-Threadпјҡ
дёҺFreeRTOSдёҚеҗҢзҡ„жҳҜпјҢRT-Thread еҜ№дёҙз•Ңж®өзҡ„дҝқжҠӨеӨ„зҗҶзҡ„еҫҲе№Іи„ҶпјҢдёҚз®ЎдёүдёғдәҢеҚҒдёҖзӣҙжҺҘжҠҠдёӯж–ӯе…ЁйғЁе…ідәҶпјҲзӣҙжҺҘж“ҚдҪңPRIMASKеҶ…ж ёеҜ„еӯҳеҷЁпјүпјҢ еҸӘжңүNMI FAULT е’ҢзЎ¬ FAULTиғҪиў«зӣёеә”гҖӮ иҝҷз§Қж–№жі•з®ҖеҚ•зІ—жҡҙпјҢжҳҜеҫҲдёҚй”ҷзҡ„йҖүжӢ©гҖӮдёҖиҲ¬жҲ‘们дёҙз•Ңж®өзҡ„еӨ„зҗҶж—¶й—ҙжҳҜжҜ”иҫғзҹӯзҡ„пјҢе…ідәҶеҶҚејҖе…¶е®һ并没жңүеӨӘеӨ§зҡ„еҪұе“ҚгҖӮ
зҺ°еңЁиҰҒзңӢзңӢRT-Threadзҡ„е…ідёӯж–ӯзҡ„д»Јз Ғе®һзҺ°пјҡ
1rt_hw_interrupt_disable PROC
2 EXPORT rt_hw_interrupt_disable
3 MRS r0, PRIMASK
4 CPSID I
5 BX LR
6 ENDP
ејҖдёӯж–ӯпјҡ
1rt_hw_interrupt_enable PROC
2 EXPORT rt_hw_interrupt_enable
3 MSR PRIMASK, r0
4 BX LR
5 ENDP
иҝҷзҹӯзҹӯзҡ„еҮ еҸҘд»Јз Ғе…¶е®һиҝҳжҳҜеҫҲжңүж„ҸжҖқзҡ„пјҢжҲ‘е°ұеј•з”ЁзҒ«е“Ҙзҡ„иҜқжқҘи§ЈйҮҠдёҖдёӢиҝҷдәӣеӨ„зҗҶж“ҚдҪңпјҲжҲ‘дёӘдәәжҳҜдёҚдјҡжұҮзј–зҡ„пјҢдҪҶжҳҜи·ҹзқҖд№ҰжқҘи§ЈиҜ»иҝҷдәӣд»Јз ҒиҝҳжҳҜеҫҲиҪ»иҖҢжҳ“дёҫзҡ„пјү
еҸҜиғҪжңүдәәжҮӮжұҮзј–зҡ„иҜқпјҢе°ұдјҡзңӢеҮәжқҘпјҢе…ідёӯж–ӯпјҢдёҚе°ұжҳҜзӣҙжҺҘдҪҝз”Ё CPSID I жҢҮд»Өе°ұиЎҢдәҶеҳӣ~ејҖдёӯж–ӯпјҢдёҚе°ұжҳҜдҪҝз”Ё CPSIE I жҢҮд»Өе°ұиЎҢдәҶеҳӣпјҢдёәе•Ҙи·ҹжҲ‘зӯүеҮЎдәәжғізҡ„дёҚдёҖж ·пјҹ
RT-Threadзҡ„еӨ„зҗҶеҘҪеғҸжҳҜеӨҡжӯӨдёҖдёҫдәҶпјҢе®һеҲҷдёҚ然пјҢвҖңжүҖжңүдёңиҘҝзҡ„еӯҳеңЁеҝ…然жңүе…¶еӯҳеңЁзҡ„ж„Ҹд№үвҖқиҝҷеҸҘиҜқеә”иҜҘжІЎдәәеҸҚй©іеҗ§~~еӣ дёәRT-ThreadиҰҒйҳІжӯўз”ЁжҲ·й”ҷиҜҜең°йҖҖеҮәдәҶдёӯж–ӯдёҙз•Ңж®өпјҢеӣ дёәиҝҷж ·еӯҗеҸҜиғҪдјҡдә§з”ҹе·ЁеӨ§зҡ„еҚұе®іпјҢжүҖд»ҘRT-Threadе°ҶеҪ“еүҚзҡ„PRIMASKзҡ„зҠ¶жҖҒдҝқеӯҳиө·жқҘпјҢиҝҷж ·еӯҗе°ұеҝ…йЎ»иҰҒе…іеӨҡе°‘ж¬Ўдёӯж–ӯе°ұеҫ—ејҖеӨҡе°‘ж¬Ўдёӯж–ӯгҖӮ
жҖҺд№ҲиҜҙе‘ўпјҢз”ЁдҫӢеӯҗжқҘиҜҒжҳҺеҗ§пјҡ
1/* дёҙз•Ңж®ө 1 ејҖе§Ӣ */
2rt_hw_interrupt_disable(); /* е…ідёӯж–ӯ,PRIMASK = 1 */
3{
4 /* дёҙз•Ңж®ө 2 */
5 rt_hw_interrupt_disable(); /* е…ідёӯж–ӯ,PRIMASK = 1 */
6 {
7 }
8 rt_hw_interrupt_enable(); /* ејҖдёӯж–ӯ,PRIMASK = 0 */ (жіЁж„Ҹ)
9}
10/* дёҙз•Ңж®ө 1 з»“жқҹ */
11rt_hw_interrupt_enable(); /* ејҖдёӯж–ӯ,PRIMASK = 0 */
еҰӮжһңзӣҙжҺҘж“ҚдҪңPRIMASKпјҢиҖҢдёҚдҝқеӯҳPRIMASKзҡ„зҠ¶жҖҒпјҢиҝҷж ·еӯҗеҪ“дёҙз•Ңж®ө2з»“жқҹеҗҺи°ғз”ЁдёҖж¬Ўжү“ејҖдёӯж–ӯпјҢйӮЈд№Ҳиҝһдёҙз•Ңж®ө1зҡ„еҗҺеҚҠйғЁеҲҶе°ұж— ж•ҲдәҶгҖӮиҖҢRT-Threadзҡ„е®һзҺ°е°ұиғҪеҫҲеҘҪйҒҝе…Қиҝҷз§Қй—®йўҳпјҢд№ҹз”Ёд»Јз ҒжқҘиҜҙжҳҺеҗ§пјҡ
1/* дёҙз•Ңж®ө 1 ејҖе§Ӣ */
2level1 = rt_hw_interrupt_disable(); /* е…ідёӯж–ӯ,level1=0,PRIMASK=1 */
3{
4 /* дёҙз•Ңж®ө 2 */
5 level2 = rt_hw_interrupt_disable(); /* е…ідёӯж–ӯ,level2=1,PRIMASK=1 */
6 {
7 }
8 rt_hw_interrupt_enable(level2); /* ејҖдёӯж–ӯ,level2=1,PRIMASK=1 */
9}
10/* дёҙз•Ңж®ө 1 з»“жқҹ */
11rt_hw_interrupt_enable(level1); /* ејҖдёӯж–ӯ,level1=0,PRIMASK=0 */
иҝҷж ·еӯҗе°ұе®Ңе…ЁйҒҝе…ҚдәҶеҜ№еҗ§пјҒ
жңүдәәеҸҲдјҡй—®дәҶпјҢFreeRTOSзҡ„дёҙз•Ңж®өиғҪе…Ғи®ёеөҢеҘ—еҗ—пјҢзӯ”жЎҲжҳҜиӮҜе®ҡзҡ„пјҢFreeRTOSдёӯж—©е·Із»ҷжҲ‘们жғіеҘҪи°ғз”Ёзҡ„еҮҪж•°дәҶпјҢ并且全йғЁдҪҝз”Ёе®Ҹе®ҡд№үе®һзҺ°дәҶпјҡ
1#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
2#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )
3#define portENTER_CRITICAL() vPortEnterCritical()
4#define portEXIT_CRITICAL() vPortExitCritical()
5#define portSET_INTERRUPT_MASK_FROM_ISR() ulPortRaiseBASEPRI()
6#define portCLEAR_INTERRUPT_MASK_FROM_ISR(x) vPortSetBASEPRI(x)
е…¶е®һеҺҹзҗҶйғҪжҳҜе·®дёҚеӨҡзҡ„пјҢйҖҡиҝҮдҝқеӯҳе’ҢжҒўеӨҚеҜ„еӯҳеҷЁbasepriзҡ„ж•°еҖје°ұеҸҜд»Ҙе®һзҺ°еөҢеҘ—дҪҝз”ЁгҖӮ
1UBaseType_t uxSavedInterruptStatus;
2
3uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
4{
5 uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
6 {
7 //дёҙз•ҢеҢәд»Јз Ғ
8 }
9 portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
10}
11portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
иҝӣе…Ҙдёӯж–ӯжәҗз Ғзҡ„е®һзҺ°пјҡ
1static portFORCE_INLINE uint32_t ulPortRaiseBASEPRI( void )
2{
3uint32_t ulReturn, ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;
4
5 __asm
6 {
7 mrs ulReturn, basepri
8 msr basepri, ulNewBASEPRI
9 dsb
10 isb
11 }
12 return ulReturn;
13}
йҖҖеҮәдёӯж–ӯжәҗз Ғе®һзҺ°пјҡпјҲи·ҹеүҚйқўзҡ„еҮҪж•°дёҖж ·пјү
1static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
2{
3 __asm
4 {
5 msr basepri, ulBASEPRI
6 }
7}
жҖ»з»“
еҜ№дәҺж—¶й—ҙе…ій”®зҡ„д»»еҠЎиҖҢиЁҖпјҢжҒ°еҰӮе…¶еҲҶең°дҪҝз”Ё PRIMASK е’Ң BASEPRI жқҘжҡӮж—¶е…ій—ӯдёҖдәӣдёӯж–ӯжҳҜйқһеёёйҮҚиҰҒзҡ„гҖӮ
FreeRTOSжәҗз Ғдёӯе°ұжңүеӨҡеӨ„дёҙз•Ңж®өзҡ„еӨ„зҗҶпјҢйҷӨдәҶFreeRTOSж“ҚдҪңзі»з»ҹжәҗз ҒжүҖеёҰзҡ„дёҙз•Ңж®өд»ҘеӨ–пјҢз”ЁжҲ·еҶҷеә”з”Ёзҡ„ж—¶еҖҷд№ҹжңүдёҙз•Ңж®өзҡ„й—®йўҳпјҢжҜ”еҰӮд»ҘдёӢдёӨз§Қпјҡ
иҜ»еҸ–жҲ–иҖ…дҝ®ж”№еҸҳйҮҸпјҲзү№еҲ«жҳҜз”ЁдәҺд»»еҠЎй—ҙйҖҡдҝЎзҡ„е…ЁеұҖеҸҳйҮҸпјүзҡ„д»Јз ҒпјҢдёҖиҲ¬жқҘиҜҙиҝҷжҳҜжңҖеёёи§Ғзҡ„дёҙз•Ңд»Јз ҒгҖӮ
и°ғз”Ёе…¬е…ұеҮҪж•°зҡ„д»Јз ҒпјҢзү№еҲ«жҳҜдёҚеҸҜйҮҚе…Ҙзҡ„еҮҪж•°пјҢеҰӮжһңеӨҡдёӘд»»еҠЎйғҪи®ҝй—®иҝҷдёӘеҮҪж•°пјҢз»“жһңжҳҜеҸҜжғіиҖҢзҹҘзҡ„гҖӮ
жҖ»д№ӢпјҢеҜ№дәҺдёҙз•Ңж®өиҰҒеҒҡеҲ°жү§иЎҢж—¶й—ҙи¶Ҡзҹӯи¶ҠеҘҪпјҢеҗҰеҲҷдјҡеҪұе“Қзі»з»ҹзҡ„е®һж—¶жҖ§гҖӮ
йӮЈеҒҮеҰӮжҲ‘жңүдёҖдёӘзәҝзЁӢпјҢеӨ„зҗҶзҡ„ж—¶й—ҙиҫғй•ҝпјҢдҪҶжҳҜжҲ‘еҸҲдёҚжғіиў«е…¶д»–зәҝзЁӢжү“ж–ӯпјҢе…ідёӯж–ӯеҸҜиғҪеҪұе“Қзі»з»ҹзҡ„жӯЈеёёиҝҗиЎҢпјҢжҖҺд№ҲеҠһе‘ўпјҹе…¶е®һеҫҲз®ҖеҚ•пјҢеңЁOSдёӯдёҖиҲ¬еҸҜд»ҘзӣҙжҺҘжҢӮиө·и°ғеәҰеҷЁпјҢзі»з»ҹжӯЈеёёиҝҗиЎҢпјҢдҪҶжҳҜдёҚдјҡеҲҮжҚўзәҝзЁӢпјҢеҪ“жҲ‘еӨ„зҗҶе®ҢеҶҚжҠҠи°ғеәҰеҷЁи§ЈйҷӨеҚіеҸҜгҖӮ
жң¬ж–ҮиҪ¬иҮӘзҪ‘з»ңпјҢзүҲжқғеҪ’еҺҹдҪңиҖ…пјҢеҰӮжһңжӮЁи§үеҫ—дёҚеҘҪпјҢиҜ·иҒ”зі»жҲ‘们еҲ йҷӨпјҒ
е№ҝе‘Ҡ
е…ідәҺз«ӢеҲӣе•ҶеҹҺ
з«ӢеҲӣе•ҶеҹҺпјҲWWW.SZLCSC.COMпјүжҲҗз«ӢдәҺ2011е№ҙпјҢиҮҙеҠӣдәҺдёәе®ўжҲ·жҸҗдҫӣдёҖз«ҷејҸз”өеӯҗе…ғеҷЁд»¶зәҝдёҠйҮҮиҙӯжңҚеҠЎпјҢ4е°Ҹж—¶й—Әз”өеҸ‘иҙ§гҖӮжӢҘжңү10000еӨҡе№іж–№зұізҺ°д»ЈеҢ–е…ғеҷЁд»¶д»“еә“пјҢзҺ°иҙ§еә“еӯҳи¶…160000з§ҚпјҢйӣҶеӣўз”өеӯҗе…Ёдә§дёҡй“ҫиҮӘиҗҘжңҚеҠЎж¶өзӣ–пјҡеңЁзәҝEDAпјҲLCEDAпјү+иЎҢдёҡйўҶе…Ҳзҡ„PCBжү“ж ·/дёӯе°Ҹжү№йҮҸ+е…ғеҷЁд»¶е•ҶеҹҺ+й’ўзҪ‘еҲ¶йҖ +SMTиҙҙзүҮ+з”өеӯҗи®ҫи®Ўж•ҷиӮІеҸҠж–№жЎҲгҖӮдҪңдёәдёҖ家е“Ғз§ҚйҪҗе…ЁгҖҒиҮӘиҗҘеә“еӯҳгҖҒиҙЁйҮҸжңүдҝқйҡңзҡ„з”өеӯҗе…ғеҷЁд»¶еһӮзӣҙе•ҶеҹҺпјҢз«ӢеҲӣе•ҶеҹҺжүҖжңүе…ғеҷЁд»¶еқҮд»ҺеҺҹеҺӮжҲ–д»ЈзҗҶе•ҶжӯЈи§„жё йҒ“йҮҮиҙӯпјҢдҝқиҜҒеҺҹиЈ…жӯЈе“ҒпјҢдёәжӮЁжҸҗдҫӣдё“дёҡзҡ„дёҖз«ҷејҸз”өеӯҗе…ғеҷЁд»¶йҮҮиҙӯжңҚеҠЎгҖӮ