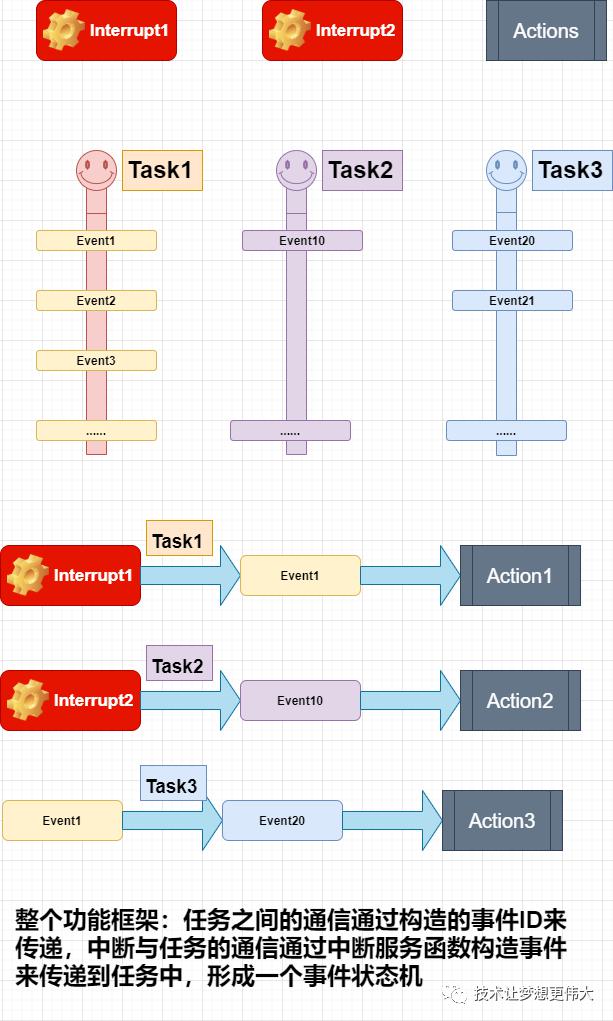
д№ӢеүҚеҲҶдә«дәҶеҫҲеӨҡе…ідәҺfreeRTOSзҡ„зҹҘиҜҶпјҢйӮЈд№ҲжҲ‘们жҖҺд№ҲеңЁе®һжҲҳдёӯеҺ»еҶҷд»Јз Ғе‘ўпјҹжң¬зҜҮж–Үз« йҮҚеңЁеҜ№еҹәдәҺfreeRTOSзҡ„жһ¶жһ„д»Јз Ғзҡ„и§ЈжһҗгҖӮж•ҙдёӘеҠҹиғҪеҰӮдёӢеӣҫпјҡ
дёәд»Җд№ҲиҰҒз”ЁfreeRTOS
еңЁе®һйҷ…йЎ№зӣ®дёӯпјҢеҰӮжһңзЁӢеәҸзӯүеҫ…дёҖдёӘи¶…ж—¶дәӢ件пјҢдј з»ҹзҡ„ж— RTOSжғ…еҶөдёӢпјҢе°ұеҸӘиғҪеңЁеҺҹең°зӯүеҫ…иҖҢдёҚиғҪжү§иЎҢе…¶е®ғд»»еҠЎпјҢеҰӮжһңдҪҝз”ЁRTOSпјҢеҲҷеҸҜд»ҘеҫҲж–№дҫҝзҡ„е°ҶеҪ“еүҚд»»еҠЎйҳ»еЎһеңЁиҜҘдәӢ件дёӢпјҢ然еҗҺиҮӘеҠЁеҺ»жү§иЎҢеҲ«зҡ„д»»еҠЎпјҢиҝҷж ·еҸҜд»Ҙй«ҳж•Ҳзҡ„еҲ©з”ЁCPUдәҶгҖӮ
дёҖиҲ¬дҪҝз”Ёжғ…еҶө
жҲ‘们еңЁејҖеҸ‘зҡ„ж—¶еҖҷпјҢжҲ‘жҖ»жҳҜеңЁmainеҮҪж•°зңӢеҲ°д»ҘдёӢзҡ„д»Јз ҒпјҢиҝҷи®©жҲ‘ж„ҹи§үдёҚжҳҜеҫҲзҲҪ
int main()
{
xTaskCreate( vTask1, "Task 1", 1000, NULL, 1, NULL );
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, NULL );
xTaskCreate( vTask3, "Task 3", 1000, NULL, 2, NULL );
vTaskStartScheduler();
while(1);
}
然еҗҺеңЁжҜҸдёӘtaskдёӯпјҢдёҖиҲ¬д»Јз Ғдјҡиҝҷж ·еҶҷ
void vTask1( void *pvParameters )
{
volatile unsigned long ul;
for( ;; )
{
xQueueSend( USART1_MSGQ, "task 1 !\n",portMAX_DELAY);
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ );
}
}
иҖҢд»»еҠЎд№Ӣй—ҙзҡ„йҖҡдҝЎд№ҹжҳҜжҜ”иҫғз№ҒзҗҗпјҢжҖ»дҪ“жқҘиҜҙпјҢд»Јз ҒдёҚжҳ“з»ҙжҠӨпјҢеўһеҮҸдёҖдёӘд»»еҠЎзҡ„иҜқиҰҒж”№зҡ„дёңиҘҝеӨӘеӨҡдәҶгҖӮдёәжӯӨжҲ‘зү№ж„Ҹи®ҫи®ЎдёҖдёӘжЎҶжһ¶пјҢеҸҜд»ҘеҫҲж–№дҫҝзҡ„еўһеҮҸд»»еҠЎпјҢеҗҢж—¶д»»еҠЎд№Ӣй—ҙйҖҡиҝҮдәӢ件йҳҹеҲ—жқҘйҖҡдҝЎгҖӮ
demo
д»»еҠЎеҲӣе»әеҮҪж•°зҡ„е°ҒиЈ…
жҲ‘们йҰ–е…Ҳе®ҡд№үдёӨдёӘд»»еҠЎпјҢжҠҠжүҖжңүд»»еҠЎдҝЎжҒҜе°ҒиЈ…еңЁtaskRecordйҮҢпјҢ并且申жҳҺеҰӮдёӢпјҡ
#define TASK_NUM 2
//жүҖжңүд»»еҠЎзҡ„дҝЎжҒҜ
static TaskRecord taskRecord[TASK_NUM];
йӮЈд№ҲTaskRecordжҖҺд№Ҳе®үжҺ’е‘ўпјҢжҲ‘们жҠҠжүҖжңүзҡ„д»»еҠЎдҝЎжҒҜйғҪж”ҫеңЁз»“жһ„дҪ“йҮҢгҖӮе…¶дёӯеҢ…жӢ¬д»»еҠЎIDпјҢд»»еҠЎд»»еҠЎеҮҪж•°taskFucnпјҢд»»еҠЎеҗҚеӯ—пјҢж Ҳзҡ„еӨ§е°ҸstackDepпјҢиҝҳжңүдјҳе…Ҳзә§prioпјҢд»»еҠЎеҸҘжҹ„taskHandleпјҢд»»еҠЎйҳҹеҲ—queueгҖӮ
typedef struct
{
int16_t Id;
TaskFunction_t taskFucn;
const char * name;
configSTACK_DEPTH_TYPE stackDep;
void * parameters;
UBaseType_t prio;
TaskHandle_t taskHandle;
QueueHandle_t queue;
} TaskRecord;
жҠҠд»»еҠЎдёӯзҡ„дёҖдәӣеҸӮж•°е°ҒиЈ…иө·жқҘпјҢж”ҫеңЁз»“жһ„дҪ“TaskInitParaпјҢе…¶дёӯеҢ…жӢ¬дәҶд»»еҠЎеҮҪж•°taskFucnпјҢд»»еҠЎеҗҚеӯ—пјҢж Ҳзҡ„еӨ§е°ҸstackDepпјҢиҝҳжңүдјҳе…Ҳзә§prioгҖӮ
typedef struct
{
TaskFunction_t taskFucn;
const char * name;
const configSTACK_DEPTH_TYPE stackDep;
UBaseType_t prio;
} TaskInitPara;
жҲ‘们еҒҡеҘҪдәҶиҝҷдәӣд№ӢеҗҺпјҢе°ұйңҖиҰҒжҠҠз»“жһ„дҪ“дёӯзҡ„еҸӮж•°ж”ҫеҲ°еҲӣе»әд»»еҠЎеҮҪж•°дёӯпјҢйӮЈд№ҲиҝҷдёӘеҮҪж•°createTasksд»Јз ҒеҰӮдёӢпјҡ
void createTasks(TaskRecord* taskRecord, const TaskInitPara* taskIniPara, int num){
int i;
for(i=0;i<num;i++){
taskRecord[i].Id = i;
taskRecord[i].taskFucn = taskIniPara[i].taskFucn;
taskRecord[i].name = taskIniPara[i].name;
taskRecord[i].stackDep = taskIniPara[i].stackDep;
taskRecord[i].parameters = &taskRecord[i];
taskRecord[i].prio = taskIniPara[i].prio;
xTaskCreate( taskRecord[i].taskFucn,
taskRecord[i].name,
taskRecord[i].stackDep,
taskRecord[i].parameters,
taskRecord[i].prio,
&taskRecord[i].taskHandle );
taskRecord[i].queue = xQueueCreate( 100, sizeof( Event ) );
}
}
е…¶дёӯnumдёәд»»еҠЎж•°йҮҸпјҢе…ҲжҠҠд»»еҠЎдҝЎжҒҜж”ҫеҲ°еҲқе§ӢеҢ–зҡ„taskRecordдёӯпјҢеҶҚжҠҠе…¶дёӯзҡ„дҝЎжҒҜеҲӣе»әд»»еҠЎгҖӮйӮЈд№Ҳд»»еҠЎеҲӣе»әеҮҪж•°е°ұеҒҡеҘҪдәҶгҖӮ
mainеҮҪж•°
жҺҘзқҖпјҢеңЁжҲ‘们зҡ„mainеҮҪж•°дёӯпјҢе°ұдёҚйңҖиҰҒйӮЈд№Ҳз№Ғзҗҗзҡ„дёҖдёӘдёҖдёӘзҡ„еҲӣе»әд»»еҠЎдәҶпјҢжҢүз…§иҝҷдёӘе°ҒиЈ…зҡ„mainеҮҪж•°еҰӮдёӢпјҡ
int main( void )
{
createTasks(taskRecord,taskInitPara,TASK_NUM);
/* Start the tasks and timer running. */
vTaskStartScheduler();
}
д»»еҠЎй—ҙйҖҡдҝЎ
йҰ–е…ҲжҲ‘们жғіжғіпјҢдёӨдёӘд»»еҠЎд№Ӣй—ҙйҖҡдҝЎйңҖиҰҒзҹҘйҒ“д»Җд№ҲпјҢtask1жғіеҫҖtask2зҡ„еҸ‘йҖҒдёҖдәӣж•°жҚ®пјҢйӮЈд№ҲйңҖиҰҒзҹҘйҒ“task2зҡ„IDеҗ§пјҢйңҖиҰҒжҠҠж•°жҚ®жү“еҢ…еҗ§пјҢtask2йңҖиҰҒзҹҘйҒ“жҳҜи°ҒеҸ‘зҡ„пјҢйӮЈд№Ҳtask1жң¬иә«зҡ„IDд№ҹйңҖиҰҒзҹҘйҒ“еҗ§гҖӮ
жҢүз…§иҝҷеҮ дёӘжҳҺзЎ®зҡ„дёңиҘҝпјҢжҲ‘们йҰ–е…ҲжҠҠд»»еҠЎдәӢ件IDжһҡдёҫеҰӮдёӢ
typedef enum {
eventID_1,
eventID_2,
eventID_3
}Event_ID;
然еҗҺжҠҠдәӢ件IDпјҢеҸ‘йҖҒиҖ…IDпјҢд»ҘеҸҠиҰҒдј иҫ“зҡ„з»“жһ„жҲ–иҖ…ж•°жҚ®жү“еҢ…е°ҒиЈ…еңЁз»“жһ„дҪ“EventдёӯпјҢд»Јз ҒеҰӮдёӢпјҡ
typedef struct{
Event_ID ID;
int16_t src; //еҸ‘йҖҒиҖ…ID
void* pData; //дј з»“жһ„гҖҒж•°жҚ®
}Event;
жҺҘзқҖпјҢжҲ‘们йңҖиҰҒжһ„йҖ дёҖдёӘдәӢ件пјҢжҠҠиҝҷдәӣдҝЎжҒҜйғҪж”ҫеңЁиҝҷдёӘдәӢ件дёӯпјҢд»Јз ҒеҰӮдёӢпјҡ
void makeEvent(Event* pEvent,int16_t myId,Event_ID evtId, const void* pData){
pEvent->ID = evtId;
pEvent->src = myId;
pEvent->pData = (void*) pData;
}
зҺ°еңЁжҲ‘们еҒҮи®ҫtask2иҰҒеҫҖtask1еҸ‘йҖҒдёҖзі»еҲ—ж•°жҚ®пјҢйӮЈд№Ҳtaskд»»еҠЎдёӯпјҢжҲ‘们йңҖиҰҒеҒҡзҡ„дәӢеҰӮдёӢпјҢиҺ·еҸ–task1дёӯйҳҹеҲ—пјҢзңӢжҳҜеҗҰдёәз©әгҖӮ
QueueHandle_t task1Queue;
int16_t myId = pMyTaskRecord->Id;
task1Queue = getTaskQueue(getTaskId("task1"));
жһ„йҖ дәӢ件
Event event;
int* ptemp; //иҝҷйҮҢиҮӘе®ҡд№үдёҖдәӣж•°жҚ®
makeEvent(&event,myId,eventID_1,(void*)ptemp);
然еҗҺжҠҠдәӢ件еҸ‘йҖҒеҮәеҺ»пјҡ
xQueueSendToBack( task1Queue, &event, 0);
еҜ№дәҺtask1жқҘиҜҙпјҢзңӢйҳҹеҲ—дёӯжҳҜеҗҰдёәз©әпјҢеҰӮжһңжңүд»»еҠЎдәӢ件жқҘпјҢд»ҺйҳҹеҲ—дёӯиҺ·еҸ–дәӢ件
TaskRecord* pMyTaskRecord = (TaskRecord*)pPara;
QueueHandle_t* evntQueue=pMyTaskRecord->queue;
еҪ“йҳҹеҲ—дёӯзЎ®е®һжңүдәӢ件时пјҢжҺҘ收дәӢ件
BaseType_t status = xQueueReceive( *evntQueue, &event, portMAX_DELAY );
if( status == pdPASS )
{
task1HandleEvent(event);
}
else
{
printf( "Task1 could not receive from the queue.\r\n" );}然еҗҺжҲ‘们еңЁtask1HandleEventеӨ„зҗҶжҺҘ收еҲ°зҡ„дәӢ件пјҢд»Јз ҒеҰӮдёӢпјҡ
void task1HandleEvent(Event event){
xil_printf( "Task1 is processing event...\r\n" );
int* p;
switch(event.ID){
case eventID_1:
p= (int*) event.pData;
xil_printf("ID=%d From: %d data=%d\r\n",event.ID, event.src,p[7]);
free(event.pData);
break;
case eventID_2:
break;
default:
break;
}
}
дёҠйқўд»Јз ҒиЎЁзӨәж №жҚ®дәӢ件IDжқҘеҲӨж–ӯжҺҘ收зҡ„жҳҜе“ӘдёӘдәӢ件пјҢеҶҚжҠҠдәӢ件IDпјҢж•°жҚ®зӯүзӯүжү“еҚ°еҮәжқҘгҖӮ
еӨ–йғЁдёӯж–ӯйҖҡдҝЎ
еҰӮжһңдёҚжҳҜд»»еҠЎй—ҙзҡ„йҖҡдҝЎпјҢиҖҢжҳҜжңүеӨ–йғЁдёӯж–ӯи§ҰеҸ‘пјҢйңҖиҰҒдёҺжҹҗдёӘд»»еҠЎиҝӣиЎҢдҝЎжҒҜдәӨдә’пјҢжҖҺд№ҲеҠһпјҹдҫӢеҰӮжңүдёҖдёӘд»ҘеӨӘзҪ‘д»»еҠЎпјҢеҪ“еӨ–йғЁзҪ‘з»ңйңҖиҰҒеҸ‘йҖҒдёҖдёӘж•°жҚ®еҢ…еҲ°иҝҷдёӘзҪ‘з»ңд»»еҠЎзҡ„ж—¶еҖҷпјҢйӮЈд№Ҳе°ұйңҖиҰҒиҝӣиЎҢеӨ–йғЁйҖҡдҝЎдәҶгҖӮеҗҢж ·жҲ‘们иҝҷж ·еҒҡпјҢеңЁд»ҘеӨӘзҪ‘жҺҘ收еҮҪж•°дёӯпјҢжһ„йҖ дәӢ件
Event event;
int* ptemp; //иҝҷйҮҢиҮӘе®ҡд№үдёҖдәӣж•°жҚ®
makeEvent(&event,myId,IntrID_1,(void*)ptemp);//еҸҜд»ҘеҶҚиҮӘе®ҡдёҖдәӣдәӢ件IDеҰӮIntrID_1
然еҗҺеҶҚеҸ‘йҖҒеҲ°иҝҷдёӘдәӢ件еҲ°иҝҷдёӘд»»еҠЎдёӯпјҢеҰӮдёӢ

жөӢиҜ•
еҰӮдёҠпјҢжҲ‘们жһ„йҖ дёҖдёӘдәӢ件пјҢеҸ‘йҖҒдёҖдәӣж•°жҚ®еҰӮдёӢ
Event event;
int* ptemp = malloc(sizeof(int)*10);
memset(ptemp,0x77,sizeof(int)*10);
makeEvent(&event,myId,eventID_1,(void*)ptemp);
жҲ‘们зңӢеҲ°з»“жһңеҰӮдёӢ
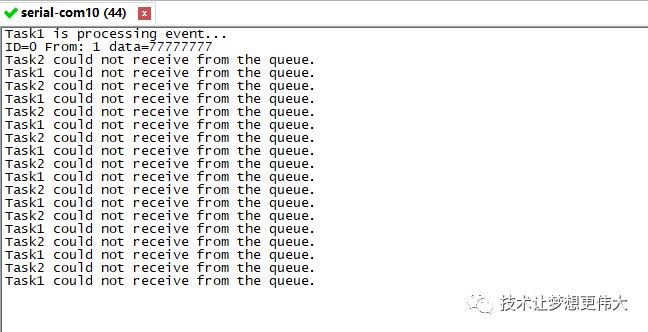
task1жҺҘеҲ°жқҘиҮӘд»»еҠЎIDдёә0пјҢдәӢ件1зҡ„ж•°жҚ®гҖӮиҝҷйҮҢжҜҸдёӘд»»еҠЎзҡ„зӯүеҫ…ж—¶й—ҙд№ҹжҳҜеҸҜд»Ҙи®ҫзҪ®зҡ„пјҢи®ҫзҪ®ж–№жі•еҰӮдёӢпјҡ
/* и®ҫзҪ®жңҖеӨ§зӯүеҫ…ж—¶й—ҙ500ms */
const TickType_t xMaxBlockTime = pdMS_TO_TICKS(500);
BaseType_t status = xQueueReceive( *evntQueue, &event, xMaxBlockTime );
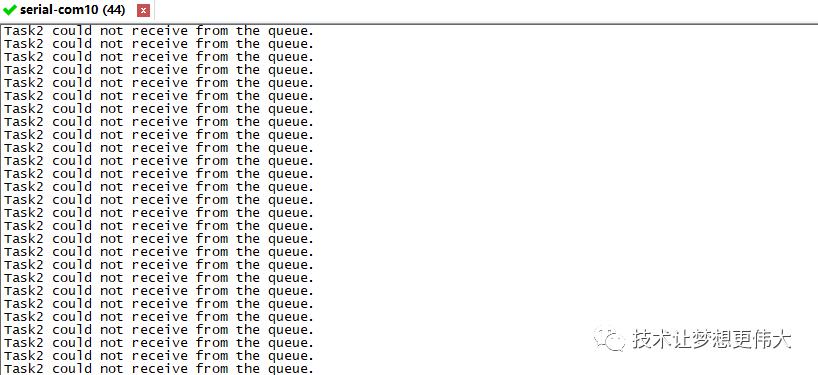
еҰӮжһңзӯүеҫ…ж—¶й—ҙдёәportMAX_DELAYжҲ–иҖ…0зҡ„иҜқпјҢиҜҙжҳҺжҹҗдёӘд»»еҠЎдёҖзӣҙеӨ„дәҺжҝҖжҙ»зҠ¶жҖҒпјҢжҜ”еҰӮtask2пјҢеҪ“зӯүеҫ…ж—¶й—ҙдёәportMAX_DELAYж—¶еҖҷпјҢеҲҷжөӢиҜ•з»“жһңеҰӮдёӢпјҡ
жүҖд»ҘжҜҸдёӘд»»еҠЎи®ҫзҪ®зҡ„ж—¶й—ҙпјҢдјҳе…Ҳзә§пјҢж ҲеӨ§е°ҸйғҪжҳҜеҫҲйҮҚиҰҒзҡ„пјҢе…·дҪ“зҡ„е°ұйңҖиҰҒеңЁйЎ№зӣ®дёӯи°ғиҜ•дәҶгҖӮ
жңҖеҗҺжҖ»з»“
жң¬зҜҮжҳҜеұһдәҺд»Јз Ғе®һжҲҳзҜҮпјҢеҜ№дәҺfreeRTOSзҡ„е…·дҪ“и®Іи§ЈйңҖиҰҒеӨ§е®¶иҮӘе·ұеҺ»йўҶдјҡпјҢжҲ‘иҝҷйҮҢжҳҜеҶҷдәҶдёҖдёӘжһ¶жһ„пјҢеё®еҠ©еӨ§е®¶еңЁйЎ№зӣ®дёӯеҺ»жӣҙеҘҪзҡ„жҗӯеҘҪжһ¶еӯҗпјҢеҪ“жҲ‘们жңүеҫҲеӨҡд»»еҠЎзҡ„ж—¶еҖҷпјҢд»»еҠЎй—ҙеҸҲжңүеҫҲеӨҡдәӨдә’йҖҡдҝЎзҡ„ж—¶еҖҷпјҢе°ұжӣҙйңҖиҰҒзҗҶи§Јиҝҷз§Қжһ¶жһ„дәҶгҖӮ