
1гҖҒз®Җд»Ӣ
CANжҳҜжҺ§еҲ¶еҷЁеұҖеҹҹзҪ‘з»ң(Controller Area Network, CAN)зҡ„з®Җз§°пјҢжҳҜдёҖз§ҚиғҪеӨҹе®һзҺ°еҲҶеёғејҸе®һж—¶жҺ§еҲ¶зҡ„дёІиЎҢйҖҡдҝЎзҪ‘з»ңгҖӮ
дјҳзӮ№пјҡ
дј иҫ“йҖҹеәҰжңҖй«ҳеҲ°1MbpsпјҢйҖҡдҝЎи·қзҰ»жңҖиҝңеҲ°10kmпјҢж— жҚҹдҪҚд»ІиЈҒжңәеҲ¶пјҢеӨҡдё»з»“жһ„гҖӮиҝ‘дәӣе№ҙжқҘпјҢCANжҺ§еҲ¶еҷЁд»·ж ји¶ҠжқҘи¶ҠдҪҺгҖӮ
Гҳ дҪҺжҲҗжң¬пјҡECUsйҖҡиҝҮеҚ•дёӘCANжҺҘеҸЈиҝӣиЎҢйҖҡдҝЎпјҢеёғзәҝжҲҗжң¬дҪҺгҖӮ
Гҳ й«ҳйӣҶжҲҗпјҡCANжҖ»зәҝзі»з»ҹе…Ғи®ёеңЁжүҖжңүECUsдёҠиҝӣиЎҢйӣҶдёӯй”ҷиҜҜиҜҠж–ӯе’Ңй…ҚзҪ®гҖӮ
Гҳ еҸҜйқ жҖ§пјҡиҜҘзі»з»ҹеҜ№еӯҗзі»з»ҹзҡ„ж•…йҡңе’Ңз”өзЈҒе№Іжү°е…·жңүеҫҲејәзҡ„йІҒжЈ’жҖ§пјҢжҳҜжұҪиҪҰжҺ§еҲ¶зі»з»ҹзҡ„зҗҶжғійҖүжӢ©гҖӮ
Гҳ й«ҳж•ҲзҺҮпјҡеҸҜд»ҘйҖҡиҝҮidеҜ№ж¶ҲжҒҜиҝӣиЎҢдјҳе…Ҳзә§жҺ’еәҸпјҢд»ҘдҫҝжңҖй«ҳдјҳе…Ҳзә§зҡ„idдёҚиў«дёӯж–ӯгҖӮ
Гҳ зҒөжҙ»жҖ§пјҡжҜҸдёӘECUеҢ…еҗ«дёҖдёӘз”ЁдәҺCANжҖ»зәҝ收еҸ‘иҠҜзүҮпјҢйҡҸж„Ҹж·»еҠ CANжҖ»зәҝиҠӮзӮ№гҖӮ
2гҖҒCANжҖ»зәҝзҪ‘з»ң
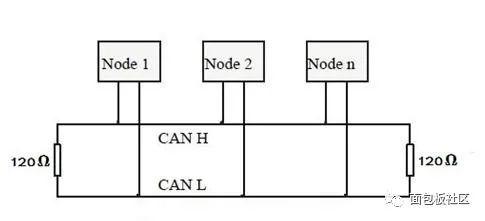
CANжҖ»зәҝзҪ‘з»ңдё»иҰҒжҢӮеңЁCAN_Hе’ҢCAN_LпјҢеҗ„дёӘиҠӮзӮ№йҖҡиҝҮиҝҷдёӨжқЎзәҝе®һзҺ°дҝЎеҸ·зҡ„дёІиЎҢе·®еҲҶдј иҫ“пјҢдёәдәҶйҒҝе…ҚдҝЎеҸ·зҡ„еҸҚе°„е’Ңе№Іжү°пјҢиҝҳйңҖиҰҒеңЁCAN_Hе’ҢCAN_Lд№Ӣй—ҙжҺҘдёҠ120欧е§Ҷзҡ„з»Ҳз«Ҝз”өйҳ»гҖӮдёәд»Җд№ҲжҳҜ120О©пјҢеӣ дёәз”өзјҶзҡ„зү№жҖ§йҳ»жҠ—дёә120О©пјҢдёәдәҶжЁЎжӢҹж— йҷҗиҝңзҡ„дј иҫ“зәҝгҖӮ
3гҖҒCAN收еҸ‘еҷЁ
CAN收еҸ‘еҷЁзҡ„дҪңз”ЁжҳҜиҙҹиҙЈйҖ»иҫ‘з”өе№іе’ҢдҝЎеҸ·з”өе№ід№Ӣй—ҙзҡ„иҪ¬жҚўгҖӮ
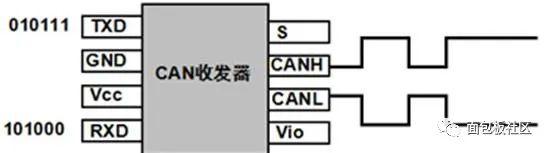
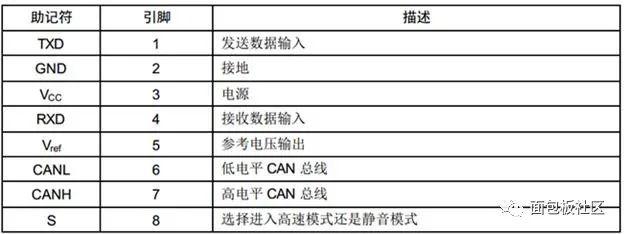
еҚід»ҺCANжҺ§еҲ¶иҠҜзүҮиҫ“еҮәйҖ»иҫ‘з”өе№іеҲ°CAN收еҸ‘еҷЁпјҢ然еҗҺз»ҸиҝҮCAN收еҸ‘еҷЁеҶ…йғЁиҪ¬жҚўе°ҶйҖ»иҫ‘з”өе№іиҪ¬жҚўдёәе·®еҲҶдҝЎеҸ·иҫ“еҮәеҲ°CANжҖ»зәҝдёҠпјҢCANжҖ»зәҝдёҠзҡ„иҠӮзӮ№йғҪеҸҜд»ҘеҶіе®ҡиҮӘе·ұжҳҜеҗҰйңҖиҰҒжҖ»зәҝдёҠзҡ„ж•°жҚ®гҖӮе…·дҪ“зҡ„еј•и„ҡе®ҡд№үеҰӮдёӢпјҡ
4гҖҒCANдҝЎеҸ·иЎЁзӨә
CANжҖ»зәҝйҮҮз”ЁдёҚеҪ’йӣ¶з ҒдҪҚеЎ«е……жҠҖжңҜпјҢд№ҹе°ұжҳҜиҜҙCANжҖ»зәҝдёҠзҡ„дҝЎеҸ·жңүдёӨз§ҚдёҚеҗҢзҡ„дҝЎеҸ·зҠ¶жҖҒпјҢеҲҶеҲ«жҳҜжҳҫжҖ§зҡ„(Dominant)йҖ»иҫ‘0е’ҢйҡҗеҪўзҡ„(recessive)йҖ»иҫ‘1пјҢдҝЎеҸ·жҜҸдёҖж¬Ўдј иҫ“е®ҢеҗҺдёҚйңҖиҰҒиҝ”еӣһеҲ°йҖ»иҫ‘0(жҳҫжҖ§)зҡ„з”өе№ігҖӮ

жҳҫжҖ§дёҺйҡҗжҖ§з”өе№ізҡ„и§ЈйҮҠпјҡ
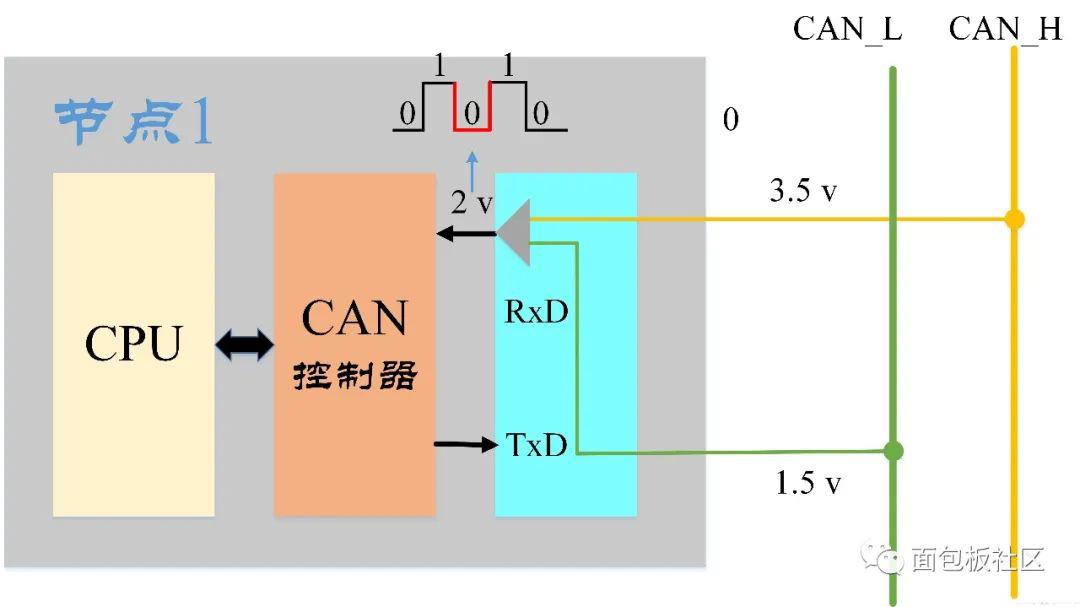
CANзҡ„ж•°жҚ®жҖ»зәҝжңүдёӨжқЎпјҢдёҖжқЎжҳҜй»„иүІзҡ„CAN_High,дёҖжқЎжҳҜз»ҝиүІзҡ„CAN_LowгҖӮеҪ“жІЎжңүж•°жҚ®еҸ‘йҖҒж—¶пјҢдёӨжқЎзәҝзҡ„з”өе№ідёҖж ·йғҪдёә2.5VпјҢз§°дёәйқҷз”өе№іпјҢд№ҹе°ұжҳҜйҡҗжҖ§з”өе№ігҖӮеҪ“жңүдҝЎеҸ·еҸ‘йҖҒж—¶пјҢCAN_Highзҡ„з”өе№іеҚҮй«ҳ1VпјҢеҚі3.5VпјҢCAN_Lowзҡ„з”өе№ійҷҚдҪҺ1VпјҢеҚі1.5VгҖӮ
жҢүз…§е®ҡд№үзҡ„пјҡ
CAN_H-CAN_L < 0.5V ж—¶еҖҷдёәйҡҗжҖ§зҡ„пјҢйҖ»иҫ‘дҝЎеҸ·иЎЁзҺ°дёә"йҖ»иҫ‘1"- й«ҳз”өе№ігҖӮ
CAN_H-CAN_L > 0.9V ж—¶еҖҷдёәжҳҫжҖ§зҡ„пјҢйҖ»иҫ‘дҝЎеҸ·иЎЁзҺ°дёә"йҖ»иҫ‘0"- дҪҺз”өе№ігҖӮ
5гҖҒCANдҝЎеҸ·дј иҫ“
еҸ‘йҖҒиҝҮзЁӢпјҡ CANжҺ§еҲ¶еҷЁе°ҶCPUдј жқҘзҡ„дҝЎеҸ·иҪ¬жҚўдёәйҖ»иҫ‘з”өе№іпјҲеҚійҖ»иҫ‘0-жҳҫжҖ§з”өе№іжҲ–иҖ…йҖ»иҫ‘1-йҡҗжҖ§з”өе№іпјүгҖӮCANеҸ‘е°„еҷЁжҺҘ收йҖ»иҫ‘з”өе№ід№ӢеҗҺпјҢеҶҚе°Ҷе…¶иҪ¬жҚўдёәе·®еҲҶз”өе№іиҫ“еҮәеҲ°CANжҖ»зәҝдёҠгҖӮ
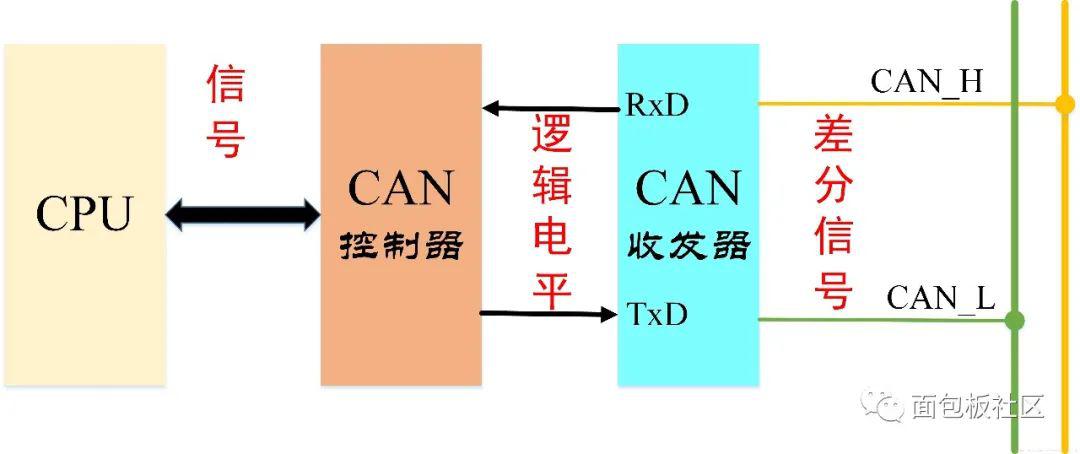
жҺҘ收иҝҮзЁӢпјҡ CANжҺҘ收еҷЁе°ҶCAN_H е’Ң CAN_L зәҝдёҠдј жқҘзҡ„е·®еҲҶз”өе№іиҪ¬жҚўдёәйҖ»иҫ‘з”өе№іиҫ“еҮәеҲ°CANжҺ§еҲ¶еҷЁпјҢCANжҺ§еҲ¶еҷЁеҶҚжҠҠиҜҘйҖ»иҫ‘з”өе№іиҪ¬еҢ–дёәзӣёеә”зҡ„дҝЎеҸ·еҸ‘йҖҒеҲ°CPUдёҠгҖӮ
5гҖҒCANж•°жҚ®дј иҫ“
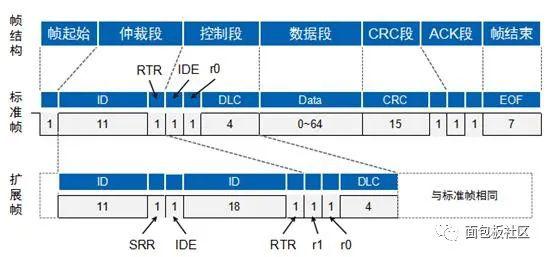
CANжҖ»зәҝдј иҫ“зҡ„жҳҜCANеё§пјҢCANзҡ„йҖҡдҝЎеё§еҲҶжҲҗдә”з§ҚпјҢеҲҶеҲ«дёәж•°жҚ®её§гҖҒиҝңзЁӢеё§гҖҒй”ҷиҜҜеё§гҖҒиҝҮиҪҪеё§е’Ңеё§й—ҙйҡ”гҖӮ
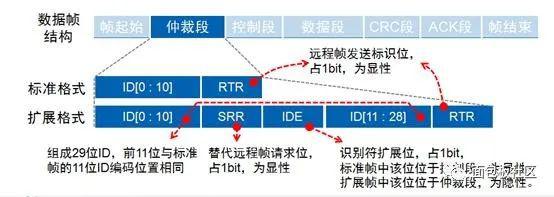
ж•°жҚ®её§ж №жҚ®д»ІиЈҒж®өй•ҝеәҰдёҚеҗҢеҲҶдёәж ҮеҮҶеё§пјҲ2.0Aпјүе’Ңжү©еұ•её§пјҲ2.0Bпјү
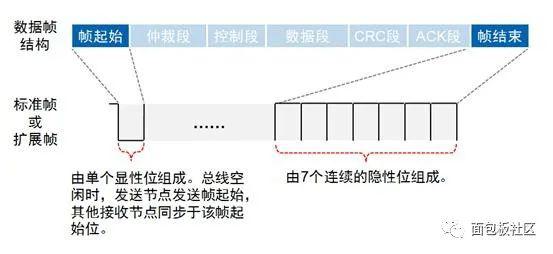
её§иө·е§Ӣ
з”ұдёҖдёӘжҳҫжҖ§дҪҚпјҲдҪҺз”өе№іпјүз»„жҲҗпјҢеҸ‘йҖҒиҠӮзӮ№еҸ‘йҖҒеё§иө·е§ӢпјҢе…¶д»–иҠӮзӮ№еҗҢжӯҘдәҺеё§иө·е§Ӣпјӣ
её§з»“жқҹ
з”ұ7дёӘйҡҗеҪўдҪҚпјҲй«ҳз”өе№іпјүз»„жҲҗгҖӮ
д»ІиЈҒж®ө
еҸӘиҰҒжҖ»зәҝз©әй—ІпјҢжҖ»зәҝдёҠд»»дҪ•иҠӮзӮ№йғҪеҸҜд»ҘеҸ‘йҖҒжҠҘж–ҮпјҢеҰӮжһңжңүдёӨдёӘжҲ–дёӨдёӘд»ҘдёҠзҡ„иҠӮзӮ№ејҖе§Ӣдј йҖҒжҠҘж–ҮпјҢйӮЈд№Ҳе°ұдјҡеӯҳеңЁжҖ»зәҝи®ҝй—®еҶІзӘҒзҡ„еҸҜиғҪгҖӮдҪҶжҳҜCANдҪҝз”ЁдәҶж ҮиҜҶз¬Ұзҡ„йҖҗдҪҚд»ІиЈҒж–№жі•еҸҜд»Ҙи§ЈеҶіиҝҷдёӘй—®йўҳгҖӮ
CANжҖ»зәҝжҺ§еҲ¶еҷЁеңЁеҸ‘йҖҒж•°жҚ®зҡ„еҗҢж—¶зӣ‘жҺ§жҖ»зәҝз”өе№іпјҢеҰӮжһңз”өе№ідёҚеҗҢпјҢеҲҷеҒңжӯўеҸ‘йҖҒ并еҒҡе…¶д»–еӨ„зҗҶгҖӮеҰӮжһңиҜҘдҪҚдҪҚдәҺд»ІиЈҒж®өпјҢеҲҷйҖҖеҮәжҖ»зәҝз«һдәүпјӣеҰӮжһңдҪҚдәҺе…¶д»–ж®өпјҢеҲҷдә§з”ҹй”ҷиҜҜдәӢ件гҖӮ
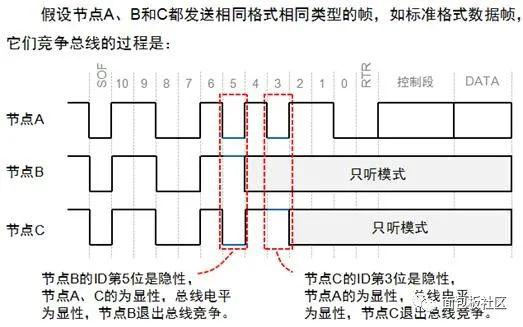
её§IDи¶Ҡе°ҸпјҢдјҳе…Ҳзә§и¶Ҡй«ҳгҖӮз”ұдәҺж•°жҚ®её§зҡ„RTRдҪҚдёәжҳҫжҖ§з”өе№іпјҢиҝңзЁӢеё§дёәйҡҗжҖ§з”өе№іпјҢжүҖд»Ҙеё§ж јејҸе’Ңеё§IDзӣёеҗҢзҡ„жғ…еҶөдёӢпјҢж•°жҚ®её§дјҳе…ҲдәҺиҝңзЁӢеё§пјӣз”ұдәҺж ҮеҮҶеё§зҡ„IDEдҪҚдёәжҳҫжҖ§з”өе№іпјҢжү©еұ•её§зҡ„IDEдҪҚдёәйҡҗеҪўз”өе№іпјҢеҜ№дәҺеүҚ11дҪҚIDзӣёеҗҢзҡ„ж ҮеҮҶеё§е’Ңжү©еұ•её§пјҢж ҮеҮҶеё§дјҳе…Ҳзә§жҜ”жү©еұ•её§й«ҳгҖӮ
ж•°жҚ®ж®ө
дёҖдёӘж•°жҚ®её§дј иҫ“зҡ„ж•°жҚ®йҮҸдёә0~8дёӘеӯ—иҠӮпјҢиҝҷз§Қзҹӯеё§з»“жһ„дҪҝеҫ—CAN-busе®һж—¶жҖ§еҫҲй«ҳпјҢйқһеёёйҖӮеҗҲжұҪиҪҰе’Ңе·ҘжҺ§еә”з”ЁеңәеҗҲеҰӮеӣҫ27жүҖзӨәгҖӮ

ж•°жҚ®йҮҸе°ҸпјҢеҸ‘йҖҒе’ҢжҺҘ收时й—ҙзҹӯпјҢе®һж—¶жҖ§й«ҳпјҢиў«е№Іжү°зҡ„жҰӮзҺҮе°ҸпјҢжҠ—е№Іжү°иғҪеҠӣејәгҖӮ
~END~
зүҲжқғеЈ°жҳҺпјҡжң¬ж–ҮиҪ¬иҮӘзҪ‘з»ңгҖӮзүҲжқғеҪ’еҺҹдҪңиҖ…жүҖжңүпјҢеҰӮжңүдҫөжқғпјҢиҜ·иҒ”зі»жҲ‘们еҲ йҷӨпјҒ
иҺ·еҸ–з”өеӯҗ硬件зҹҘиҜҶпјҢзӮ№еҮ»дёӢж–№е…іжіЁжҲ‘们
в–Ҫ
 вңӘ
вңӘ