
еүҚиЁҖ
жөӢиҜ•д»Јз Ғзҡ„иҝҗиЎҢж—¶й—ҙзҡ„дёӨз§Қж–№жі•пјҡ
дҪҝз”ЁеҚ•зүҮжңәеҶ…йғЁе®ҡж—¶еҷЁпјҢеңЁеҫ…жөӢзЁӢеәҸж®өзҡ„ејҖе§ӢеҗҜеҠЁе®ҡж—¶еҷЁпјҢеңЁеҫ…жөӢзЁӢеәҸж®өзҡ„з»“е°ҫе…ій—ӯе®ҡж—¶еҷЁгҖӮдёәдәҶжөӢйҮҸзҡ„еҮҶзЎ®жҖ§пјҢиҰҒиҝӣиЎҢеӨҡж¬ЎжөӢйҮҸпјҢ并иҝӣиЎҢе№іеқҮеҸ–еҖјгҖӮ
еҖҹеҠ©зӨәжіўеҷЁзҡ„ж–№жі•жҳҜпјҡеңЁеҫ…жөӢзЁӢеәҸж®өзҡ„ејҖе§Ӣйҳ¶ж®өдҪҝеҚ•зүҮжңәзҡ„дёҖдёӘGPIOиҫ“еҮәй«ҳз”өе№іпјҢеңЁеҫ…жөӢзЁӢеәҸж®өзҡ„з»“е°ҫйҳ¶ж®өеҶҚд»ӨиҝҷдёӘGPIOиҫ“еҮәдҪҺз”өе№ігҖӮз”ЁзӨәжіўеҷЁйҖҡиҝҮжЈҖжҹҘй«ҳз”өе№ізҡ„ж—¶й—ҙй•ҝеәҰпјҢе°ұзҹҘйҒ“дәҶиҝҷж®өд»Јз Ғзҡ„иҝҗиЎҢж—¶й—ҙгҖӮжҳҫ然пјҢеҖҹеҠ©дәҺзӨәжіўеҷЁзҡ„ж–№жі•жӣҙдёәз®ҖдҫҝгҖӮ
еҖҹеҠ©зӨәжіўеҷЁж–№жі•зҡ„е®һдҫӢ
Delay_usеҮҪж•°дҪҝз”ЁSTM32зі»з»ҹж»ҙзӯ”е®ҡж—¶еҷЁе®һзҺ°пјҡ
#include "systick.h"
/* SystemFrequency / 1000 1msдёӯж–ӯдёҖж¬Ў * SystemFrequency / 100000 10usдёӯж–ӯдёҖж¬Ў * SystemFrequency / 1000000 1usдёӯж–ӯдёҖж¬Ў */
#define SYSTICKPERIOD 0.000001#define SYSTICKFREQUENCY (1/SYSTICKPERIOD)
/** * @brief иҜ»еҸ–SysTickзҡ„зҠ¶жҖҒдҪҚCOUNTFLAG * @param ж— * @retval The new state of USART_FLAG (SET or RESET). */static FlagStatus SysTick_GetFlagStatus(void) { if(SysTick->CTRL&SysTick_CTRL_COUNTFLAG_Msk) { return SET; } else { return RESET; }}
/** * @brief й…ҚзҪ®зі»з»ҹж»ҙзӯ”е®ҡж—¶еҷЁ SysTick * @param ж— * @retval 1 = failed, 0 = successful */uint32_t SysTick_Init(void){ /* и®ҫзҪ®е®ҡж—¶е‘Ёжңҹдёә1us */ if (SysTick_Config(SystemCoreClock / SYSTICKFREQUENCY)) { /* Capture error */ return (1); }
/* е…ій—ӯж»ҙзӯ”е®ҡж—¶еҷЁдё”зҰҒжӯўдёӯж–ӯ */ SysTick->CTRL &= ~ (SysTick_CTRL_ENABLE_Msk | SysTick_CTRL_TICKINT_Msk); return (0);}
/** * @brief us延时зЁӢеәҸ,10usдёәдёҖдёӘеҚ•дҪҚ * @param * @arg nTime: Delay_us( 10 ) еҲҷе®һзҺ°зҡ„延时дёә 10 * 1us = 10us * @retval ж— */void Delay_us(__IO uint32_t nTime){ /* жё…йӣ¶и®Ўж•°еҷЁе№¶дҪҝиғҪж»ҙзӯ”е®ҡж—¶еҷЁ */ SysTick->VAL = 0; SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
for( ; nTime > 0 ; nTime--) { /* зӯүеҫ…дёҖдёӘ延时еҚ•дҪҚзҡ„з»“жқҹ */ while(SysTick_GetFlagStatus() != SET); }
/* е…ій—ӯж»ҙзӯ”е®ҡж—¶еҷЁ */ SysTick->CTRL &= ~ SysTick_CTRL_ENABLE_Msk;}жЈҖйӘҢDelay_usжү§иЎҢж—¶й—ҙдёӯз”ЁеҲ°зҡ„GPIO(gpio.hгҖҒgpio.c)зҡ„й…ҚзҪ®пјҡ
/* еёҰеҸӮе®ҸпјҢеҸҜд»ҘеғҸеҶ…иҒ”еҮҪж•°дёҖж ·дҪҝз”Ё */ GPIO_SetBits(GPIOB,GPIO_Pin_0);\ \ GPIO_ResetBits(GPIOB,GPIO_Pin_0)void GPIO_Config(void);
/** * @brief еҲқе§ӢеҢ–GPIO * @param ж— * @retval ж— */void GPIO_Config(void){ /*е®ҡд№үдёҖдёӘGPIO_InitTypeDefзұ»еһӢзҡ„з»“жһ„дҪ“*/ GPIO_InitTypeDef GPIO_InitStructure;
/*ејҖеҗҜLEDзҡ„еӨ–и®ҫж—¶й’ҹ*/ RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); }еңЁmainеҮҪж•°дёӯжЈҖйӘҢDelay_usзҡ„жү§иЎҢж—¶й—ҙпјҡ
/** * @brief дё»еҮҪж•° * @param ж— * @retval ж— */int main(void){ GPIO_Config();
/* й…ҚзҪ®SysTickе®ҡж—¶е‘Ёжңҹдёә1us */ SysTick_Init();
for(;;) { TX(HIGH); Delay_us(1); TX(LOW); Delay_us(100); } }зӨәжіўеҷЁзҡ„и§ӮеҜҹз»“жһңпјҡ
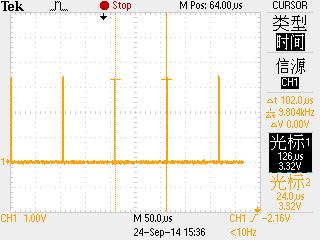
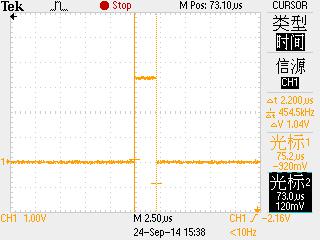
еҸҜи§ҒDelay_us(100)пјҢжү§иЎҢдәҶеӨ§жҰӮ102usпјҢиҖҢDelay_us(1)жү§иЎҢдәҶ2.2usгҖӮ
жӣҙж”№дёҖдёӢmainеҮҪж•°зҡ„延时еҸӮж•°пјҡ
int main(void){ /* LED з«ҜеҸЈеҲқе§ӢеҢ– */ GPIO_Config();
/* й…ҚзҪ®SysTickе®ҡж—¶е‘Ёжңҹдёә1us */ SysTick_Init();
for(;;) { TX(HIGH); Delay_us(10); TX(LOW); Delay_us(100); } }зӨәжіўеҷЁзҡ„и§ӮеҜҹз»“жһңпјҡ

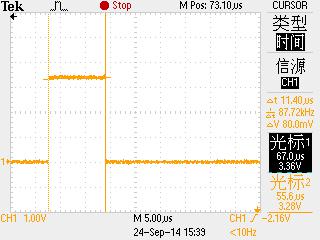
еҸҜи§ҒDelay_us(100)пјҢжү§иЎҢдәҶеӨ§жҰӮ101usпјҢиҖҢDelay_us(10)жү§иЎҢдәҶ11.4usгҖӮ
з»“и®әпјҡжӯӨ延时еҮҪж•°еҹәжң¬дёҠиҝҳжҳҜеҸҜйқ зҡ„гҖӮ
дҪҝз”Ёе®ҡж—¶еҷЁж–№жі•зҡ„е®һдҫӢ
Delay_usеҮҪж•°дҪҝз”ЁSTM32е®ҡж—¶еҷЁ2е®һзҺ°пјҡ
/* SystemFrequency / 1000 1msдёӯж–ӯдёҖж¬Ў * SystemFrequency / 100000 10usдёӯж–ӯдёҖж¬Ў * SystemFrequency / 1000000 1usдёӯж–ӯдёҖж¬Ў */
/** * @brief е®ҡж—¶еҷЁ2зҡ„еҲқе§ӢеҢ–,пјҢе®ҡж—¶е‘Ёжңҹ1uS * @param ж— * @retval ж— */void TIM2_Init(void){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
/*AHB = 72MHz,RCC_CFGRзҡ„PPRE1 = 2пјҢжүҖд»ҘAPB1 = 36MHz,TIM2CLK = APB1*2 = 72MHz */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); /* Time base configuration */ TIM_TimeBaseStructure.TIM_Period = SystemCoreClock/SYSTICKFREQUENCY -1; TIM_TimeBaseStructure.TIM_Prescaler = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_ARRPreloadConfig(TIM2, ENABLE); /* и®ҫзҪ®жӣҙж–°иҜ·жұӮжәҗеҸӘеңЁи®Ўж•°еҷЁдёҠжәўжҲ–дёӢжәўж—¶дә§з”ҹдёӯж–ӯ */ TIM_UpdateRequestConfig(TIM2,TIM_UpdateSource_Global); TIM_ClearFlag(TIM2, TIM_FLAG_Update);}
/** * @brief us延时зЁӢеәҸ,10usдёәдёҖдёӘеҚ•дҪҚ * @param * @arg nTime: Delay_us( 10 ) еҲҷе®һзҺ°зҡ„延时дёә 10 * 1us = 10us * @retval ж— */void Delay_us(__IO uint32_t nTime){ /* жё…йӣ¶и®Ўж•°еҷЁе№¶дҪҝиғҪж»ҙзӯ”е®ҡж—¶еҷЁ */ TIM2->CNT = 0; TIM_Cmd(TIM2, ENABLE);
for( ; nTime > 0 ; nTime--) { /* зӯүеҫ…дёҖдёӘ延时еҚ•дҪҚзҡ„з»“жқҹ */ while(TIM_GetFlagStatus(TIM2, TIM_FLAG_Update) != SET); TIM_ClearFlag(TIM2, TIM_FLAG_Update); }
TIM_Cmd(TIM2, DISABLE);}еңЁmainеҮҪж•°дёӯжЈҖйӘҢDelay_usзҡ„жү§иЎҢж—¶й—ҙпјҡ
TimingVarTypeDef Time;
int main(void){ TIM2_Init(); SysTick_Init(); SysTick_Time_Init(&Time); for(;;) { SysTick_Time_Start(); Delay_us(1000); SysTick_Time_Stop(); } }жҖҺд№ҲеҺ»зңӢжЈҖжөӢз»“жһңе‘ўпјҹз”Ёи°ғиҜ•зҡ„еҠһжі•пјҢжү“ејҖи°ғиҜ•з•ҢйқўеҗҺпјҢе°ҶTimeеҸҳйҮҸж·»еҠ еҲ°WatchдёҖж ҸдёӯгҖӮ然еҗҺе…ЁйҖҹиҝҗиЎҢзЁӢеәҸпјҢж—ўеҸҜд»ҘзңӢеҲ°TimeдёӯдҝқеӯҳеҸҳйҮҸзҡ„еҸҳеҢ–жғ…еҶөпјҢе…¶дёӯTimeWidthAvrageе°ұжҳҜжңҖз»Ҳзҡ„з»“жһңгҖӮ
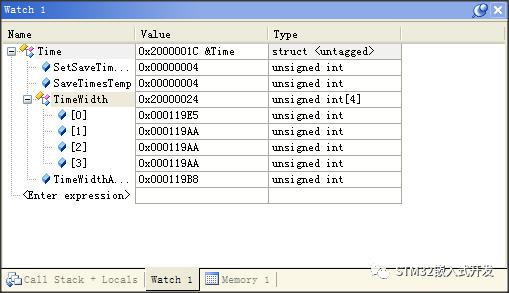
еҸҜд»ҘзңӢеҲ°TimeWidthAvrageзҡ„еҖјзӯүдәҺ0x119B8,еҚҒиҝӣеҲ¶ж•°еҜ№еә”72120пјҢж»ҙзӯ”е®ҡж—¶еҷЁзҡ„дёҖдёӘж»ҙзӯ”дёә1/72MпјҲsпјүпјҢжүҖд»ҘDelay_us(1000)зҡ„жү§иЎҢж—¶й—ҙе°ұжҳҜ72120*1/72M (s) = 0.001001sпјҢд№ҹе°ұжҳҜ1msгҖӮйӘҢиҜҒжҲҗеҠҹгҖӮ
еӨҮжіЁпјҡе®ҡж—¶еҷЁж–№жі•иҫ“еҮәжЈҖжөӢз»“жһңжңүеҫ…ж”№е–„пјҢдҪ еҸҜд»ҘжҠҠеҫ—еҲ°зҡ„TimeWidthAvrageиҪ¬жҚўжҲҗж—¶й—ҙпјҲд»ҘusгҖҒmsгҖҒsпјүдёәеҚ•дҪҚпјҢ然еҗҺйҖҡиҝҮдёІеҸЈжү“еҚ°еҮәжқҘпјҢдёҚиҝҮиҝҷйғЁеҲҶе·ҘдҪңеҜ№дәҺз»ҸеёёдҪҝз”Ёи°ғиҜ•зҡ„дәәе‘ҳжқҘиҜҙд№ҹеҸҜжңүеҸҜж— гҖӮ
дёӨз§Қж–№жі•еҜ№жҜ”
иҪҜ件жөӢиҜ•ж–№жі•
ж“ҚдҪңиө·жқҘеӨҚжқӮпјҢз”ұдәҺеңЁеҺҹд»Јз ҒеҹәзЎҖдёҠеўһеҠ дәҶжөӢиҜ•д»Јз ҒпјҢеҸҜиғҪдјҡеҪұе“ҚеҲ°еҺҹд»Јз Ғзҡ„е·ҘдҪңпјҢжөӢиҜ•еҸҜйқ жҖ§зӣёеҜ№иҫғдҪҺгҖӮз”ұдәҺдҪҝз”Ё32дҪҚзҡ„еҸҳйҮҸдҝқеӯҳsystickзҡ„и®Ўж•°ж¬Ўж•°пјҢи®Ўж—¶зҡ„жңҖеӨ§й•ҝеәҰеҸҜд»ҘиҫҫеҲ°2^32/72M = 59.65 sгҖӮ
зӨәжіўеҷЁж–№жі•
ж“ҚдҪңз®ҖеҚ•пјҢеңЁеҺҹд»Јз ҒеҹәзЎҖдёҠеҮ д№ҺжІЎжңүеўһеҠ д»Јз ҒпјҢжөӢиҜ•еҸҜйқ жҖ§еҫҲй«ҳгҖӮз”ұдәҺзӨәжіўеҷЁзҡ„жҳҫзӨәиғҪеҠӣжңүйҷҗпјҢи¶…иҝҮ1sд»ҘдёҠзҡ„зЁӢеәҸж®өпјҢи®Ўж—¶ж•ҲжһңдёҚжҳҜеҫҲзҗҶжғігҖӮдҪҶжҳҜпјҢйҖҡеёёзҡ„еҚ•зүҮжңәзЁӢеәҸе®һж—¶жҖ§иҰҒжұӮеҫҲй«ҳпјҢдёҖиҲ¬дёҚдјҡеҮәзҺ°зЁӢеәҸж®өж—¶й—ҙи¶…иҝҮз§’зә§зҡ„жғ…еҶөгҖӮ
~END~
зүҲжқғеЈ°жҳҺпјҡжң¬ж–ҮиҪ¬иҮӘзҪ‘з»ңгҖӮзүҲжқғеҪ’еҺҹдҪңиҖ…жүҖжңүпјҢеҰӮжңүдҫөжқғпјҢиҜ·иҒ”зі»жҲ‘们еҲ йҷӨпјҒ
иҺ·еҸ–з”өеӯҗ硬件зҹҘиҜҶпјҢзӮ№еҮ»дёӢж–№е…іжіЁжҲ‘们
в–Ҫ
 вңӘ
вңӘ