
å°æšåĻäššæīä―åžæšïžåæķæŧįŧäļäļæšåĻäššæåŧščŋįĻäļéå°įååæŠæĨįæđčŋæđåãåĻåäšŦįæäŧķéå
åŦäšįŧæčŪūčŪĄãįĻåšæ§åķãįĩč·ŊčŪūčŪĄäŧĨåå
ķäŧæĻĄåįļå
ģčĩæäūåĪ§åŪķåčã
ææŦįđåŧé čŊŧåæïžåŊäŧĨč·åįļå ģčĩæã
æšåĻäššåįåæ
éĶå æĨįæååūïž

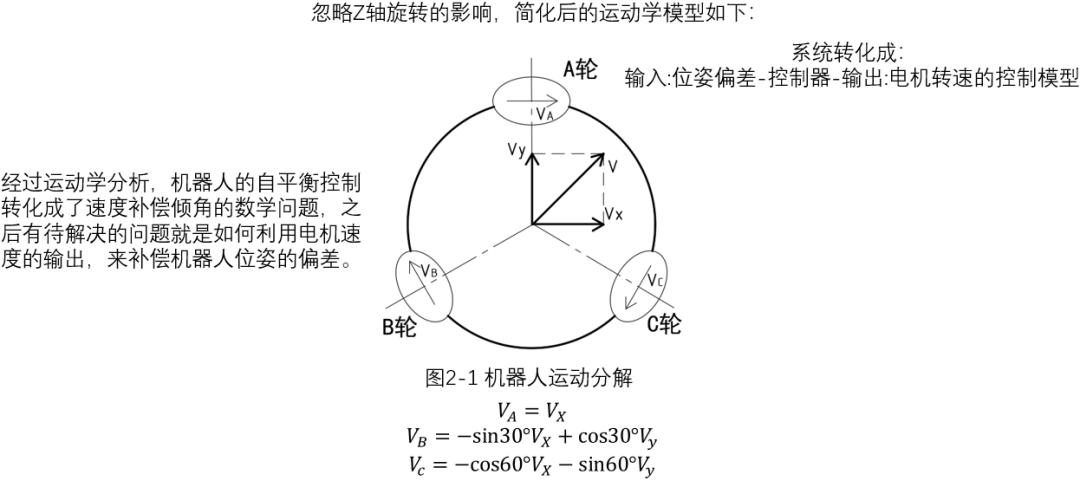
åĶåūæįĪšïžčŊĨæšåĻäššæ đæŪéčšäŧŠįä―å§ŋæ°æŪïžéčŋäļäļŠå Ļåč―ŪéĐąåĻåšéĻįä―č°æīčŠå·ąåĻįäļįä―į―ŪïžäŋæåĻæåđģ襥įåæķåŪį°å Ļåį§ŧåĻã
äŋæåĻæåđģ襥čŋįĻéčĶåŊđæšåĻäšščŋčĄčŋåĻåĶåæïžčŋéåčäšåđģ襥å°č―ĶäđåŪķįčŋåĻåĶæđįĻïž
čŠåđģ襥æ§åķéŪéĒč―ŽåäļšäļæĨïžčūå ĨXãYč§åšĶâæ§åķåĻčŪĄįŪâčūåšAãBãCįĩæšč―Žéįæ§åķæĻĄåã
æ§åķåĻčŪūčŪĄ
éĶå ččåčåđģ襥č―Ķæ§åķïžįäļčŠåđģ襥æšåĻäššæŽčīĻäļäūįķæŊäļäļŠäļéķåįŦæéŪéĒã
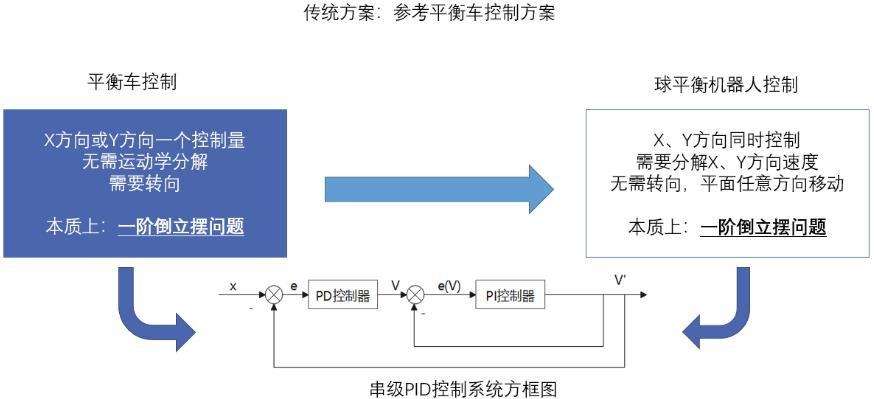
čŋéåčäšéĢæåĄå°įīįŦč―Ķįæ§åķæđæģïžéįĻäļēįš§PIDæ§åķåĻïžåĪįŊPDč§åšĶįŊïžå įŊéåšĶPIįŊãįļå ģæįŦ ïžã
įąäšæįéĐąåĻæđæĄéæĐįæŊ42æĨčŋįĩæšïžåĻéåšĶéįŊįæķåæäšéŪéĒãæĢåļļįįīæĩįĩæš+įžį åĻįæ§åķæđæĄåŊäŧĨéčŋįžį åĻå°č―ŪåįįåŪéåšĶčŪĄįŪåšæĨïžäŧčåæ§åķåĻįįæģč―Žéä―å·ŪïžåŪį°éåšĶæ§åķã
čæčŋéįéåšĶéįŊæŊéčŋčŪĄįŪäļäļäļŠæķéåĻææķįŧæĨčŋįĩæšįæ§åķéïžéčŋčŋåĻåĶæđįĻåč§Ģïžåūå°æšåĻäššįčæéåšĶïžäļįæģč―Žéä―å·Ūæ§åķãæčŪĪäļščŋį§éåšĶéįŊæđåžčŋæŊååĻäļåŪįžšé·įïžä―æŊåĻį―äļæĨįčŪšæįæķåæåį°æåūåĪčŠåđģ襥æšåĻäššé―æŊįĻ42æĨčŋįĩæšæĨåŪį°éåšĶéįŊįïžäļįĨéæŊäŧäđæđæģã
čŋéčŋåŊäŧĨåĨ―åĨ―æčäļäļäļšäŧäđč§åšĶįŊčĶįĻPDæ§åķïžéåšĶįŊčĶPIæ§åķïžč§åšĶįŊįPéĻååDéĻååŊđæšåĻäššæ§åķæäŧäđå―ąåïžåĻåūåĪCSDNč°čŊåđģ襥č―ĶįååŪĒäļé―æč§Ģéïžčŋéå°ąįįŧåĪ§åŪķæčäšã
įĄŽäŧķåįŧæčŪūčŪĄ
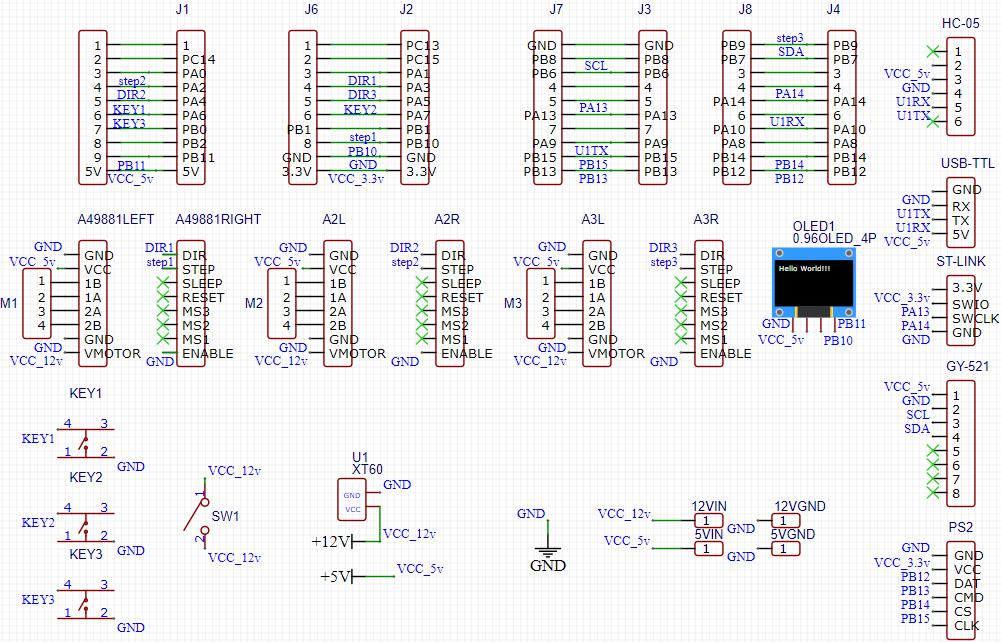
čŠåđģ襥æšåĻäššįįĄŽäŧķæļ åæïž
56mmå Ļåč―Ū 45å /äļŠ
42æĨčŋįĩæš 25/äļŠ
42æĨčŋéįŊæĻĄå 59.8å /äļŠ
LM2596SéåæĻĄå 20å
STM32F103C8T6-4éĢæ§æŋ 59.8å
GY-521å č―īéčšäŧŠ 25å
įĻå°įæĻĄååĪ§čīåĶäļæįĪšïžC8T6įäŧ·æ žéįæčŋčŊįæķĻäŧ·įīįšŋäļåïžæį―åŦäšåŪéŠåŪĪįäļĪåæŋåïžį°åĻäđ°äļååŪåĻåĪŠčīĩïžåŊäŧĨįčŊįäŧ·æ žįĻģåŪäļäšåäđ°ãå
ķä―åžå
ģæéįåļļč§å
äŧķäļåčĩčŋ°ã
įĩč·ŊåįåūåĶäļæįĪšïž
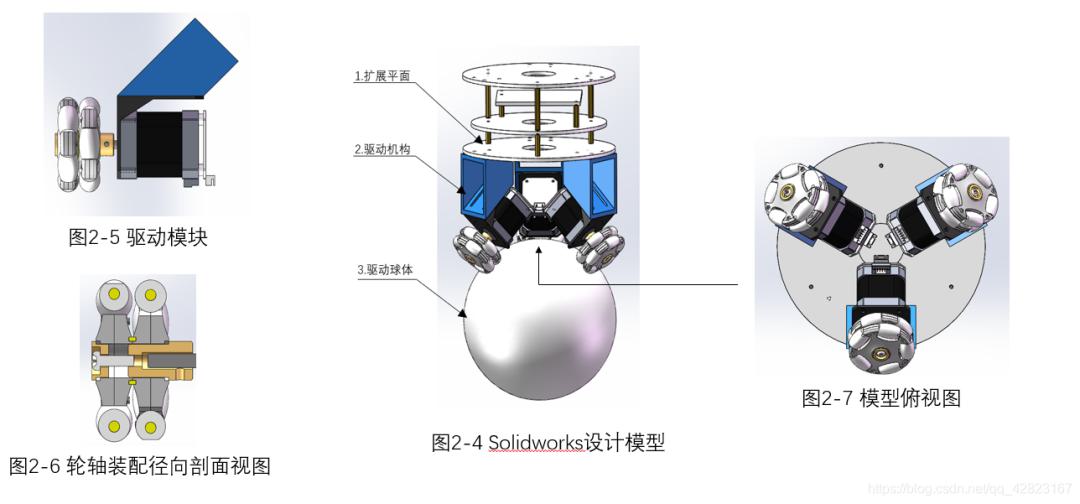
æšåĻäššä―ŋįĻsolidworksčŪūčŪĄæīä―įŧæïžåšæŋåŊåĻæåŪåŪåķ6050åĪŠįĐšéååēïžččēäŧķäļšæĢåļļ3Dæå°äŧķã
įĻåšéĻå
åĻkeil 5äļåžåSTM32ã
æ§åķįĻåšéįĻåŪæķåĻ0.5msåŪæķäļæįæđåžčŋčĄčŪĄįŪïžæŊč§ĶåäļĪæŽĄäļæčŪĄįŪåŊđįĩæšæ§åķäļæŽĄïžčŋéčŋæŊæĻčåĪ§åŪķéįĻåĪéĻäļæčŊŧåGY-521äļįINTåžčįæđåžïžæ§åķčŪĄįŪåĻæãGY-521äļįINTåžčæŊ5msč§ĶåäļæŽĄč·ģåïžéįĻåĪéĻäļæįæđåžåŊäŧĨäļĨæ žäŋčŊčŊŧåä―å§ŋæ°æŪäļčŪĄįŪåĪįåæĨã
int TIM1_UP_IRQHandler (void) { u8 key_cal; if(TIM_GetITStatus(TIM1,TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM1,TIM_IT_Update); flag_target=!flag_target; key_cal=KEY_Scan(0); if(state_flag==1)//įŦæĢįŧæ { if(flag_target==1)//æŊčŊŧåäļĪæŽĄéčšäŧŠæ§åķäļæŽĄ { Read_DMP(); //===čŊŧååūč§ scope(); return 0; } } if(key_cal==1)//įŦæĢæéŪ { Angle_Zero_X=Angle_Balance_X; Angle_Zero_Y=Angle_Balance_Y; key_cal=0; Flag_Stop=0; } if(key_cal==2||key_cal==3)//įŦæĢæéŪ { Flag_Stop=1;//å
ģééåšĶįŊIį§Ŋå key_cal=0; } Angle_Bias_X =Angle_Balance_X-Angle_Zero_X; //č·åYæđåįåå·Ū Angle_Bias_Y =Angle_Balance_Y-Angle_Zero_Y; //č·åYæđåįåå·Ū if(control_mode==0)//PIDæ§åķæĻĄåž { Encoder_Analysis(Motor_A,Motor_B,Motor_C); //æĢčŋåĻåĶåæïžåūå°X YæđåįéåšĶ Balance_Pwm_X= balance_X(Angle_Bias_X,Gyro_Balance_X);//Xæđåįåūč§æ§åķ Balance_Pwm_Y=-balance_Y(Angle_Bias_Y,Gyro_Balance_Y); //Yæđåįåūč§æ§åķ// if(++flag_target_2==4)//éåšĶįŊéĒįæ
Ēäšå éåšĶįŊ ä―æŊčŋæēĄå éåšĶįŊ // { Velocity_Pwm_X=velocity_X(compute_X); //XæđåįéåšĶæ§åķ Velocity_Pwm_Y=velocity_Y(compute_Y); //YæđåįéåšĶæ§åķ // flag_target_2=0;// } Move_X =Balance_Pwm_X+Velocity_Pwm_X; //===Xæđåæ§åķéįīŊå Move_Y =Balance_Pwm_Y+Velocity_Pwm_Y; //===Yæđåæ§åķéįīŊå Move_Z=0; Kinematic_Analysis(Move_X,Move_Y,Move_Z);//éčŋåĻåĶåæåūå°ABCįĩæšæ§åķé } Motor_A=Target_A;//įīæĨč°čPWMéĒį Motor_B=Target_B;//įīæĨč°čPWM Motor_C=Target_C;//įīæĨč°čPWM//äŧĨäļé―æŊäļšäšéåšĶčŋįŧååĪįéēæĒįŠå if(Motor_A==0) Motor_A=motor_a_last; if(Motor_B==0) Motor_B=motor_b_last; if(Motor_C==0) Motor_C=motor_c_last; Xianfu_Pwm(2000); Set_Pwm(Motor_A,Motor_B,Motor_C); Gyro_Balance_X_last=Gyro_Balance_X; Gyro_Balance_Y_last=Gyro_Balance_Y; Gyro_Balance_Z_last=Gyro_Balance_Z; Angle_Balance_X_last=Angle_Balance_X; Angle_Balance_Y_last=Angle_Balance_Y; Angle_Balance_Z_last=Angle_Balance_Z; motor_a_last=Motor_A; motor_b_last=Motor_B; motor_c_last=Motor_C; } return 0;} åŊđäšįĩæšæ§åķïžįąäšéįĻįéĐąåĻæđæĄæŊæĨčŋįĩæšïžč°éįæđåžæŊæđåéĐąåĻæĨčŋįĩæšįčåēéĒįãæčŋééæĐäšäļäļŠåŪæķåĻïžåĻæč°čåŪæķåĻįéĒįïžå
·ä―æđåžæŊåĻåå§åæķčŪūåŪåĨ―åŪæķåĻįéĒåéĒįģŧæ°pscįåžïžįķååĻįĻåšéåĻææīæđARRåŊååĻįåžïžäŧčæđååŪæķåĻįåŪæķéĒįã//čŋéäŧĨAįĩæšįéåšĶæ§åķäļšäū čūå
Ĩäļš įĩæšæđååįĩæšéåšĶvoid set_motorA_speed(u8 dir,u16 speed){ u32 arr; arr=speed; TIM_ARRPreloadConfig(TIM3,DISABLE); TIM3->ARR=arr;//čŪĄæ°å°10000åĻå―éķéæ°čŪĄæ° TIM3->CCR4=arr/2;//äŋæå įĐšæŊäļš50% TIM_ARRPreloadConfig(TIM3,ENABLE); TIM_Cmd(TIM3,ENABLE); if(dir==0) { GPIO_SetBits(GPIOA,GPIO_Pin_1); } else { GPIO_ResetBits(GPIOA,GPIO_Pin_1); }} å°č―ĶįčŋåĻåĶåč§ĢäŧĢį åŪį°åĶäļïžåčäšåđģ襥å°č―ĶäđåŪķįäŧĢį ïž
/**********************************************************å―æ°åč―ïžå°č―ĶčŋåĻæ°åĶæĻĄåå
ĨåĢåæ°ïžX Y Z äļč―īéåšĶæč
ä―į―Ūčŋå åžïžæ ***********************************************************/void Kinematic_Analysis(float Vx,float Vy,float Vz){ Target_A = Vx + L_PARAMETER*Vz; Target_B = -X_PARAMETER*Vx + Y_PARAMETER*Vy + L_PARAMETER*Vz; Target_C = -X_PARAMETER*Vx - Y_PARAMETER*Vy + L_PARAMETER*Vz;}/*****************************************************************å―æ°åč―ïžå°č―ĶčŋåĻ æĢčŋåĻåĶåæ å
ĨåĢåæ°ïžA B CäļäļŠįĩæšįéåšĶčŋå åžïžæ ******************************************************************/void Encoder_Analysis(float Va,float Vb,float Vc){ compute_X=(Va*2-Vb-Vc); compute_Y=((Vb-Vc)*sqrt(3)); compute_Z=(Va+Vb+Vc); } å
ķä―äŧĢį äļå
ĻæūåšïžåŊåĻææŦįđåŧâé
čŊŧåæâäļč――æĨįãæŧįŧäļåąæ
įäļčŠåđģ襥æšåĻäššåŊäŧĨä―äļšįŪæģčŊéŠåđģå°ïž čūå ĨčūåšåšåŪïžæīæĒäļåæ§åķåĻïžå°æ°æŪåŊžå ĨMATLABčŋčĄåæåģåŊæŊčūæ§åķåĻæ§č―ã
äļŠäšščŪĪäļšįŧææäļĪäļŠæđčŋæđåïžäļæđéĒåčäŧĨäļčŪšæïžä―äđ. åįéĐąåĻčŠåđģ襥æšåĻäššä―å§ŋč§ĢįŪäļæ§åķįģŧįŧį įĐķ[D].æĶæąį§æåĪ§åĶ,2019ãčŪšæäļéįĻįåčķģåžéĐąåĻįŧææīæåĐäšæšåĻäšščŠåđģ襥æ§åķã
åĶäļæđéĒåŊäŧĨåĒå įä―åæšåĻäššåšåŪčĢ
į―ŪïžåĐįĻæšæĒ°įŧæå°æšåĻäššäļåšéĻéĐąåĻįįŧåæäļäļŠæīä―éēæĒæšåĻäššč·ģč―ŪįéŪéĒãåæķéĐąåĻįåŊđäšæšåĻäššåđģ襥įå―ąåčūåĪ§ïžæåĨ―čŋæŊåŪåķįĐšåŋéĒįïžįķåå·æžåĒåĪ§æĐæĶåïžææåĐäšæšåĻäšščŠåđģ襥æ§åķã
æ§åķéĻåįæđčŋïžéĶå æŊæ§åķåįïžæŽææŊéåŊđåŧšįŦåĨ―įčŋåĻåĶæđįĻčŋčĄåæïžéčŋäļēįš§PIDįŪæģæĨåŪį°čŠåđģ襥čŋåĻãčŊĨæšåĻäššįæ§åķéŪéĒæŽčīĻäļæŊäļéķåįŦæéŪéĒïžåŊäŧĨéįĻåĻååĶåŧšæĻĄįæđåžïžéčŋåĻååĶåæįŪåšåđģ襥éčĶįčæåįĐïžååŊđįĩæščŋčĄåįĐæ§åķãįļå ģæĻčïžã
å ķæŽĄæŊæ§åķåĻïžPIDæ§åķįŪæģåšįĻåđŋæģä―äđæäļåŪįįžšįđïžåŊäŧĨččéįĻæĻĄįģPIDïžADRCčŠææ°æ§åķåĻïžåžšååĶäđ įæšč―æ§åķįŪæģåŊđæšåĻäšščŠåđģ襥čŋčĄæ§åķã
åæéūæĨ
https://blog.csdn.net/qq_42823167/article/details/118085368įđåŧåæč·åįļå ģčĩæ
~END~
įæåĢ°æïžæįŦ č―ŽčŠį―įŧãįæå―åä―č
ææïžåĶæäūĩæïžčŊ·čįģŧæäŧŽå éĪïž
å ģæģĻæäŧŽïžæķč·æīåĪįĩåææŊ
â―
åĨ―ææĻč
ãįđåŧåūįé čŊŧã
â―