前言
随着扫地机器人的购入门槛不断降低、大量普及,人们对于扫地机器人这一智能家居新成员逐渐熟识之后也提出了更多要求和期望,就比方说清扫区域的自定义。
相信不少家庭现在还在用传统的随机碰撞扫地机器人,常常难以规避其在清扫过程中随意闯入卧室、卫生间,甚至转上几圈之后带回来一堆不该清扫的东西。毕竟扫地机器人没有长人眼,在不加限制的情况下,一刀切地把该清理的和不该清理的通通碰一遍是无法规避的。

针对这一问题,石头扫地机器人早在2018年便在当时的主力产品上升级加持了“禁区”与“软件虚拟墙”功能,在当时用户便可通过米家APP设定设备清扫禁区,再也不怕扫地机器人随处乱逛。

到了今年,接过主力担当的石头扫地机器人T6发布即原生支持“禁区”与“软件虚拟墙”功能,接下来就一同来看两项功能的效果如何。
“禁区”实测
石头扫地机器人T6集合了LDS激光雷达及SLAM算法,能够以高频率进行智能测距,设备将通过激光雷达信息分析距离完成精准测距,并通过测得地图智能规划设备清扫路线。
在LDS激光雷达的基础上,石头扫地机器人T6还配备红外碰撞保护传感器和防跌落传感器,在清扫过程中判断清扫前方障碍物距离及清扫目标高度空间,并以此智能规划如何清扫或避开,也为禁区功能的正常运行提供了前提保障。

如图,使用者可以通过米家APP该界面调整石头扫地机器人T6清扫禁区的范围,在手机端APP主界面可以清楚地看到设备剩余电量、清扫面积及清扫时间,我们来手动点击、拖动,即可手动圈画房间清扫禁区。
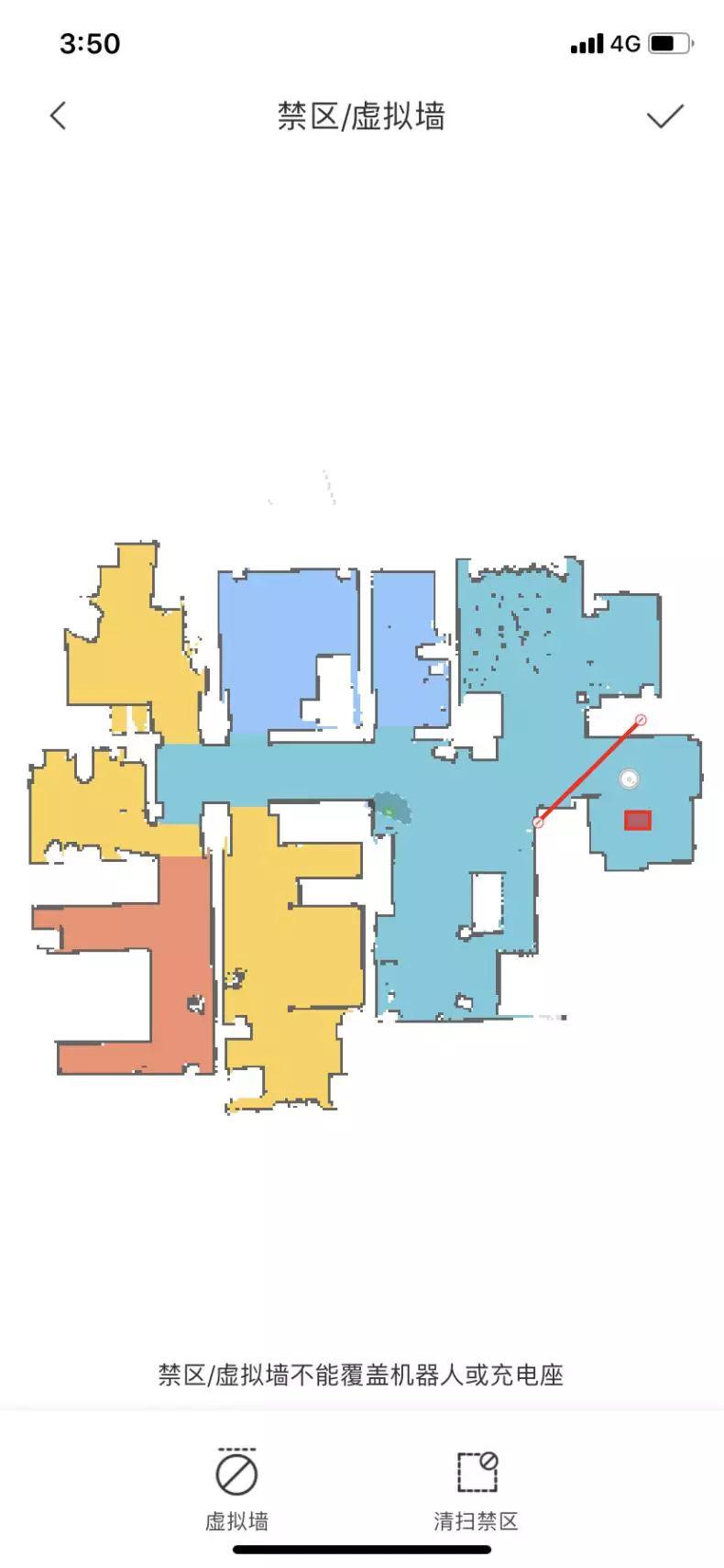

根据我们在App上所看到的实时显示清扫路径,可以看到石头机器人的T6行进路线变化,行走完一段路程之后遭遇禁区的“围墙”便掉头撤退。改变了以往传统扫地机器人特别是随机碰撞式需要通过设置外置实体虚拟墙或磁条来设定禁扫区的状况。
“虚拟墙”实测
我们所看到的的地图是由石头扫地机器人T6利用LDS激光测距传感器快速扫描房间获取距离信息,然后再通过SLAM算法,实时构建而成。其对室内各种物品的准确定位来规划清扫路径,免去四处碰撞的麻烦,也是软件虚拟墙正常运行的基础。
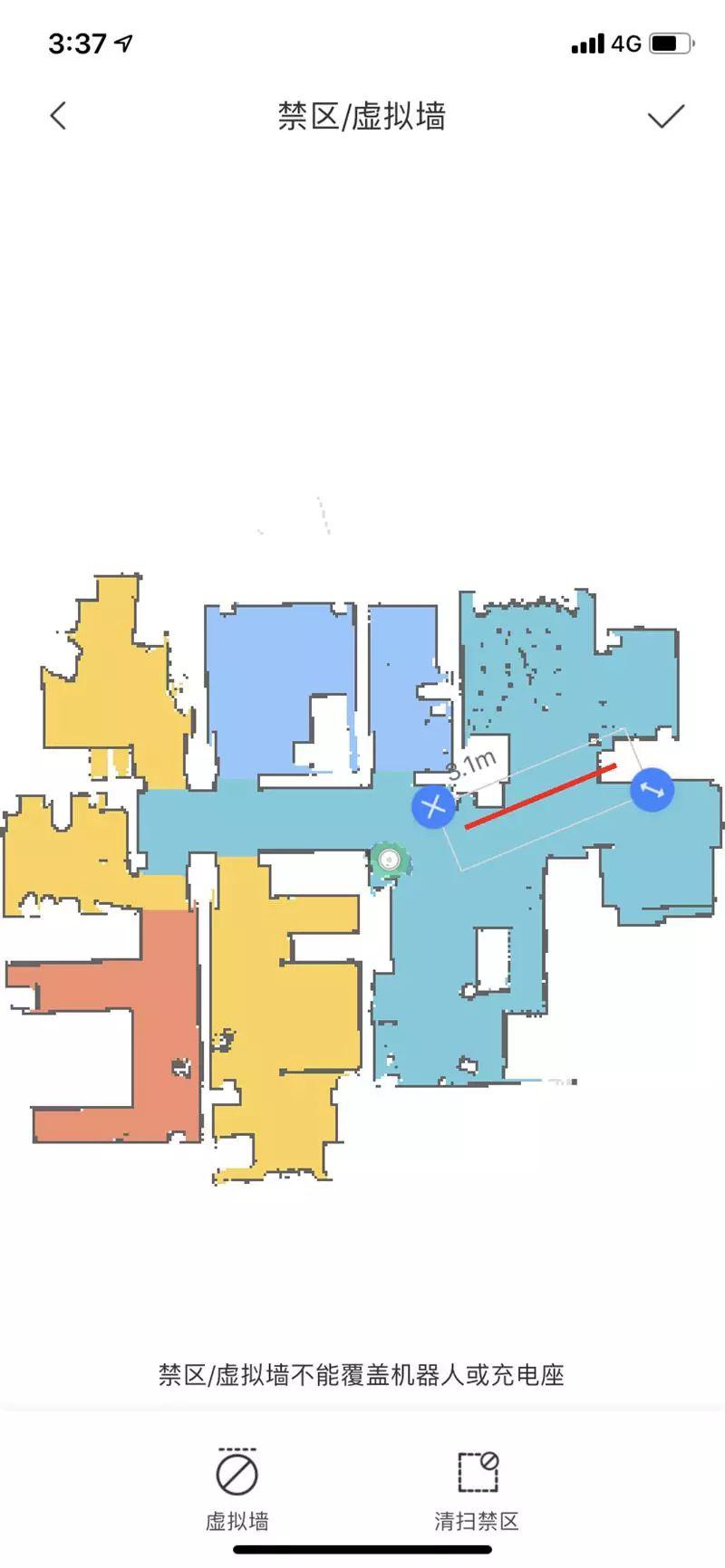
如上图所示,笔者在扫地机器人所扫描生成的地图上随手勾勒了一道虚拟墙,然后我们将石头扫地机器人T6放入其中开动清理。

由以上动图,可以看到扫地机器人在遭遇虚拟禁区的“空气墙”之后掉头就走,与使用物理虚拟墙的效果完全相同,不会突破空气中的这道无形虚拟墙半步。
总结
由笔者通过对石头扫地机器人T6的亲身体验可见,其自发布便原生搭载的“禁区”功能、“软件虚拟墙”功能确确实实与实体墙所具备的功能相同,能够带来几乎一致的体验,为我们的日常使用带来了极大便利,从此只需一键便可让机器人绕行,再不需多掏银子、多花力气。
目前,石头扫地机器人T6已经在电商平台开售,其星钻礼盒版双十一当天到手仅2499元,可戳阅读原文前往参与预购。